Accuracy Analysis of Surface Normal Reconstruction in Stereo Vision |
|---|
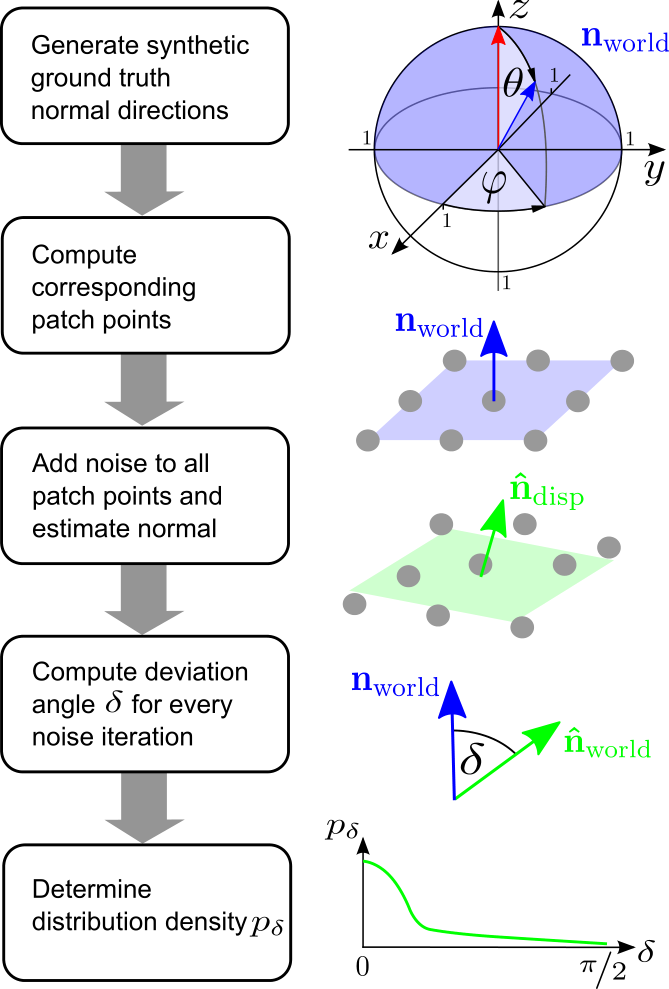
Estimating surface normals is an important task in computer vision, e.g. in surface reconstruction, registration and object detection. In stereo vision, the error of depth reconstruction increases quadratically with distance. This makes estimation of surface normals an especially demanding task. In this paper, we analyze how error propagates from noisy disparity data to the orientation of the estimated surface normal. Firstly, we derive a transformation for normals between disparity space and world coordinates. Afterwards, the propagation of disparity noise is analyzed by means of a Monte Carlo method. Normal reconstruction at a pixel position requires to consider a certain neighborhood of the pixel. The extent of this neighborhood affects the reconstruction error. Our method allows to determine the optimal neighborhood size required to achieve a pre specified deviation of the angular reconstruction error, defined by a confidence interval. We show that the reconstruction error only depends on the distance of the surface point to the camera, the pixel distance to the principal point in the image plane and the angle at which the viewing ray intersects the surface.
Main Steps
 Paper
Paper