Motivation
Viele Systeme zur Lokalisierung von Schienenfahrzeugen erfordern die Anbringung spezieller Infrastrukturelementen bespielsweise Balisen, LZB-Schleifen oder PZB-Magneten. Ihre Installation und Unterhaltung ist aufwändig und kostenintensiv. Aktuelle Entwicklungen versuchen vermehrt Satellitenortungssysteme wie GPS, Glonass oder Galileo zur Ortung einzusetzen. Dabei stellt man fest, dass die gleisselektive Ortung auch mit Korrekturdaten nicht überall gewährleistet werden kann, beispielsweise in Tunnel oder Bahnhofsgebäuden. Sogenannte Smart-Sensoren nahmen mit einer Kamera Bilder der Strecke auf und bestimmen die Posititon des Fahrzeugs durch Bildauswertung und kartierten Features. Je nach Wetter und Tageszeit schränken schlechte Sichtbedingungen die Einsatzfähigkeit solcher Sensoren ein. Vegetation und bauliche Eingriffe können das Umfeld von Gleisanlagen stark verändern und erschweren die Wiedererkennung und damit die Lokalisierung.
Der Differenz-Induktivitäts-Sensor (DIS) bietet die Möglichkeit zur bordautonomen absoluten Posititonierung. Das kartenbasierte Verfahren benötigt zur Ortung eine oder zwei Schienen und stellt damit keine Anforderungen an Umgebung und Infrastruktur. Des Weiteren zeichnet sich der DIS durch seine geringe Leistungsaaufnahme und Kosten aus.
Ferromagnetische Signatur

Durch seine ferromagnatischen Eigenschaften wirkt ein Material auf das Magnetfeld der näheren Umgebung ein. Nach diesem Messprinzip misst der DIS die ferromagnatischen Eigenschaften der Schienen. Die ferromagnatischen Eigenschaften von Schienen weisen Inhomogenitäten auf, die ortsabhängig variieren. Die Änderungen können sehr unterschiedlich aussehen und bilden eine Art Signatur, die für ein betrachtetes Schienenstück einzigartig ist.
Difference Inductance Sensor (DIS)
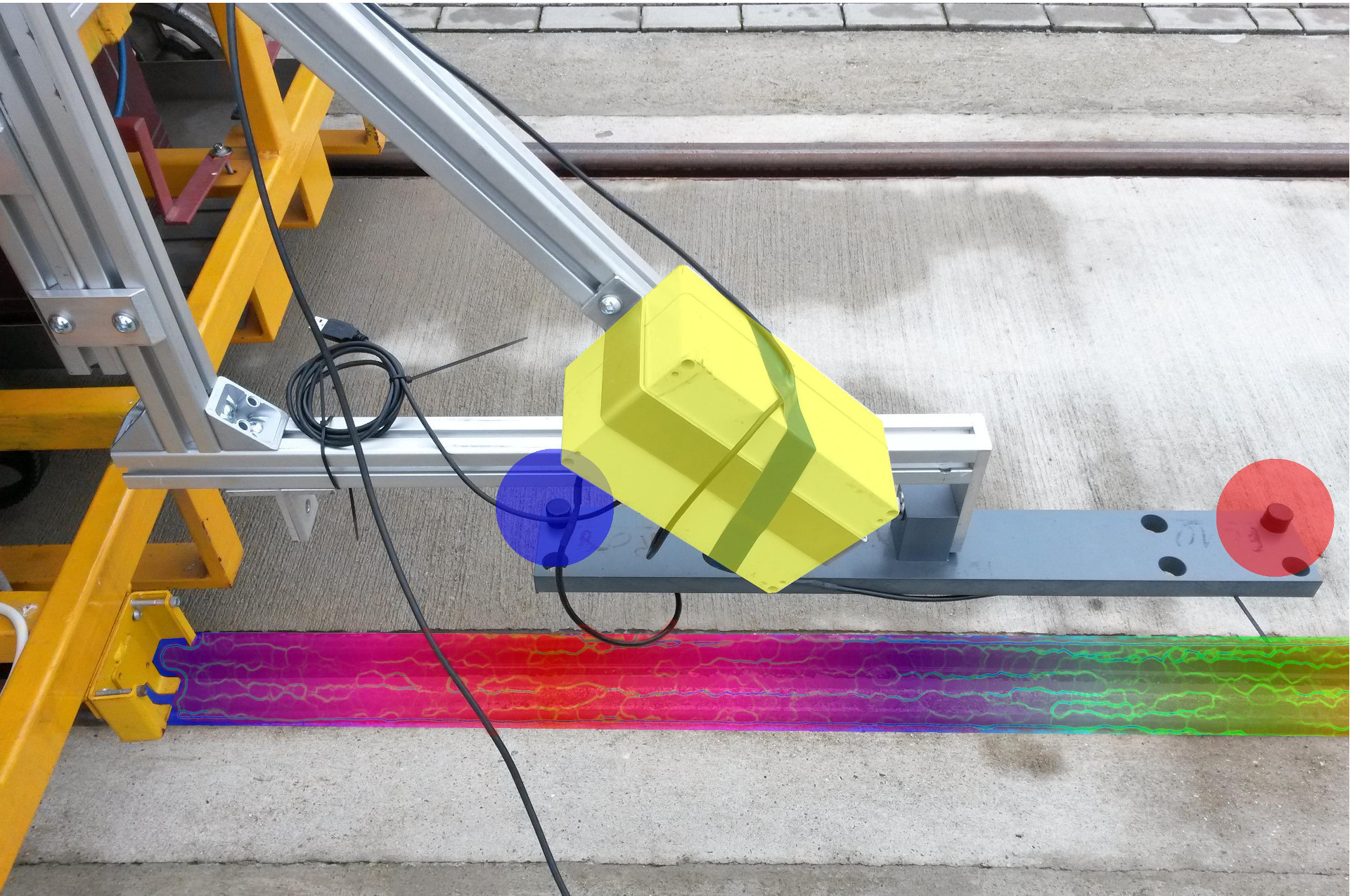
Der DIS Sensor besteht aus zwei, in festem Abstand montierten Detektoren und einer Auswerteeinheit. Mit Hilfe der Detektoren werden die ferromagnatischen Eigenschaften der Schiene erfasst. Die Auswerteeinheit steuert die Detektoren, berechnet digitale Signale und stellt diese zur Weiterverarbeitung zur Verfügung.
Geschwindigkeit
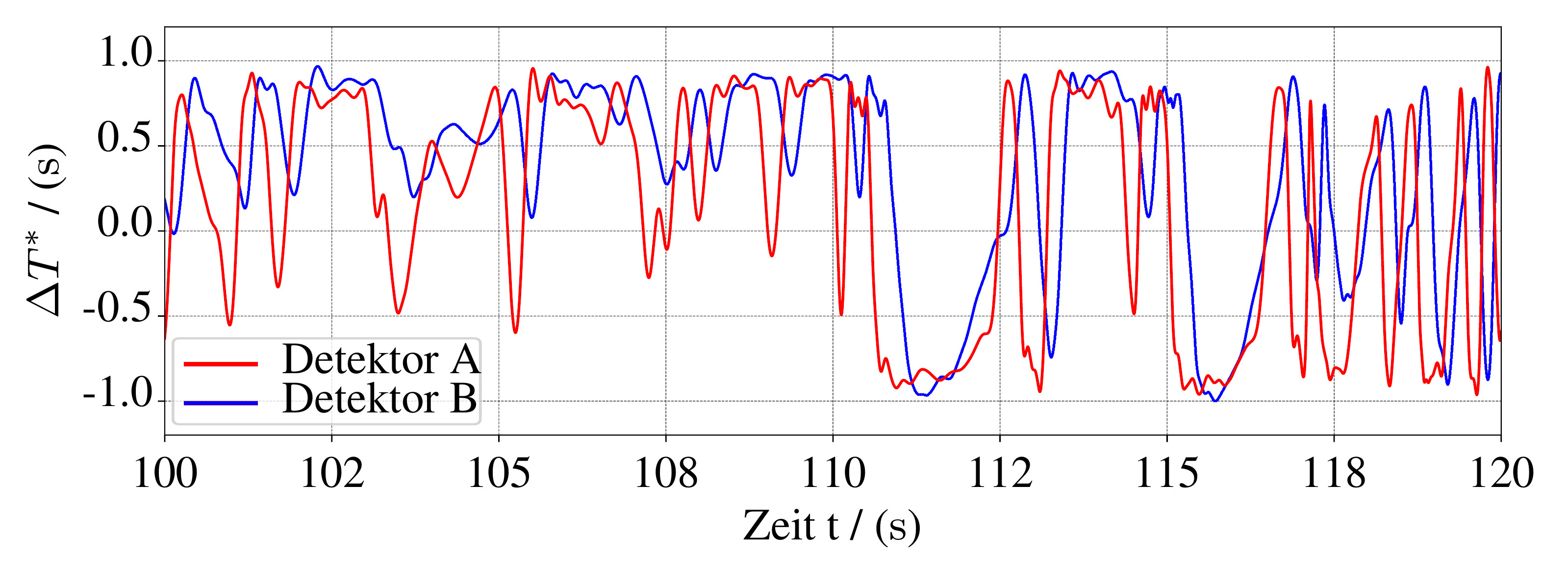
Durch den Vergleich der Signale der beiden Detektoren kann die absolute Geschwindigkeit des Fahrzeugs bestimmt werden. Mit Hilfe eines Template-Matching-Verfahrens werden die gemessene Signale zeueinander verschoben und der zeitliche Versatz bestimmt. Die Geschwindigkeit des Fahrzeugs lässt sich aus diesem zeitlichen Versatz und dem Abstand der beiden Detektoren bestimmen.
Karte
In einer Karte sind die ferromagnetischen Signaturen zu allen befahrenen Gleissegmenten gespeichert. Außerdem ist in der Karte hinterlegt wie die einzelnen Gleissegmente zusammenhängen und wie von einem Segment in ein anderes gefahren werden kann. In diesen Informationen ist die Topologie des Gleisnetzes hinterlegt.
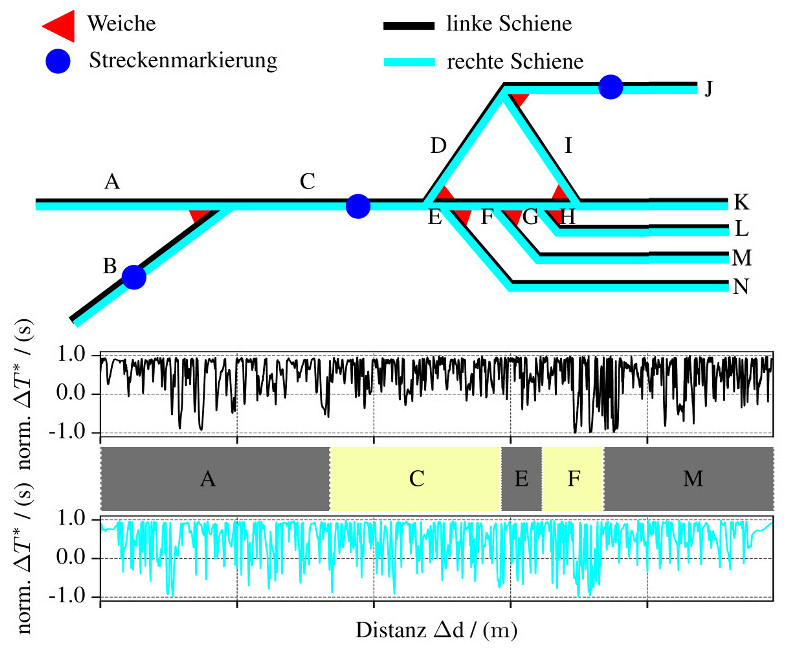
Mit Hilfe einer ID, die auf ein Gleissegment verweist und einer Längenangabe, die wie ein Streckenkilometer einen Punkt auf diesem Gleissegment beschreibt, kann die Position eines Schienenfahrzeugs im Gleisnetz eindeutig angegeben werden. Dazu werden keine weiteren Koordinatensysteme oder geodätische Referenzen benötigt.
Points of interest (POIs)
In der Regel dient die Lokalisierung zur Gewinnung ortsspezifischer Informationen. In Bahnanwendungen könnten solche ortspezifischen Informationen beispielsweise die erlaubte Maximalgeschwindigkeit, die Lage von Bahnsteigen oder Signalen sein. Solche Informationen können in der Karte gespeichert und dann mit der ermittelten Position zur Verfügung gestellt werden.
Geodätische Referenz
Zur visuellen Aufbereitung können in der Karte zusätzlich geodätische Koordinaten gespeichert werden. Diese ermöglichen eine Darstellung der Karte in gewohnter Art, sodass diese beispielsweise über eine bereits existierende Karte oder ein Luftbild gelegt werden kann. Außerdem bieten solche Referenzkoordinaten die Möglichkeit die durch das System bestimmte Position mit den Ergebnissen anderer Lokalisierungssysteme zu vergleichen.
Position
Mit Hilfe der bestimmten Geschwindigkeit werden die Signale der Detektoren entzerrt und dabei von von zeitabhängigen Signalen in ortsabhängige Signale überführt. Diese Ortssignale sind unabhängig von der Fahrgeschwindigkeit beim Aufzeichnen der Signale und können mit den Signaturen aus der Karte verglichen werden. Dabei wird mit einem Template-Matching-Verfahren die Signatur in der Karte gesucht, die die größte Übereinstimmung mit der gemessenen Signatur aufweist. Es besteht die Möglichkeit mehrere passende Signaturen zu betrachten und nach weiteren Messungen zu verwerfen. Außerdem kann durch eine vorherige Position der Suchraum in der Karte eingeschränkt und Mehrdeutigkeiten reduzirt werden. Mit der gefundenen Signatur in der Karte ist die Position des Fahrzeugs bestimmt.