
Eddy-Current-Sensor based non-contact speed measurement for rail vehicles
- Ansprechperson:
- Projektgruppe:
For using current rail network capacity more efficient a precise and secure positioning of rail vehicles is required. Therefore an eddy current sensor has been developed at MRT. It allows non-contact and slip-free measurement of speed as well as detection of landmarks.
Following EU enlargement, globalization and a growing internal market, the traffic in Germany has risen sharply in recent years. Despite a decline in rail car fleet, particularly the freight has increased significantly on rails. Current forecasts suggest that this trend will lead until 2025 to an increase in total rail traffic by 15 percent, and an increase of rail transport load by 65 percent, with an increase in road transport load by 75 percent.
The Institute of Measurement and Control Systems (MRT) deals with the question of how the utilization of the existing rail network can be improved effectively. This requires a precise and secure positioning of rail vehicles. Focus of research is non-contact speed estimation, landmark detection and automatic on-board created accurate maps.
The most important requirement for the position measurement and localization is a precise velocity determination. Although absolute sensors, such as for example GPS now provide very accurate speed values, these are not due to the frequent failure by shading in valleys, forests and tunnels suited to provide a security system. The conventional measurement with odometer, however, is conditioned by a high slip, too vague.
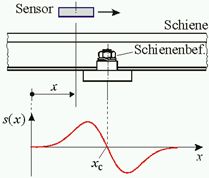
The newly developed eddy current sensor is based on non-contact measurement methods that detect inhomogeneities along the rail, in the simplest case, the threshold fixtures.
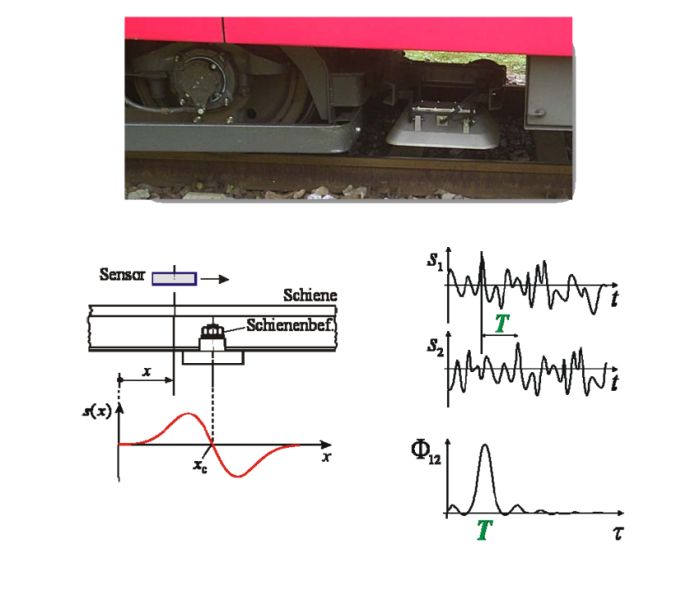 |
If two sensors are mounted in a row on a train bogie with known distance l, one gets two ideally identical sensor signals that are shifted by the time T against each other. A run-time correlation of sensor signals, determines T, which results in a very accurate velocity estimate. Current research focuses on the support and expansion of this basic principle. Among other things, model-based filtering approaches and correlative warping algorithms are investigated. This allows determining the covered path with a minimum of integrative drift.
The sensor is robust, and works – in contrast to radar and optical systems - independent of weather conditions and is compared to satellite-based systems, permanently available. The same sensors can also detect and classify infrastructure components along the track. This information is used for global localization by interpreting it as landmarks within a map.