
Following EU enlargement, globalization and a growing internal market, the traffic in Germany has risen sharply in recent years. Despite a decline in rail car fleet, particularly the freight has increased significantly on rails. Current forecasts suggest that this trend will lead until 2025 to an increase in total rail traffic by 15 percent, and an increase of rail transport load by 65 percent, with an increase in road transport load by 75 percent. The Institute for measurement and control technology (MRT) deals with the question of how the utilization of the existing rail network can be improved effectively. This requires a precise and secure positioning of rail vehicles. Focus of research is non-contact speed estimation, landmark detection and automatic on-board created accurate maps. The MRT-developed eddy current sensor is based on a non-contact, differential measurement method that can detect inhomogeneities in the track area. These inhomogeneities can be threshold fixtures, cables, but also turnouts. The current research deals with the question of how to detect these within the signal, to separate and classify them and employ them as landmarks in a digital map.
The research employs stochastic methods, after the previous procedure based on threshold values, has proved not suitable for effective extraction of individual events.
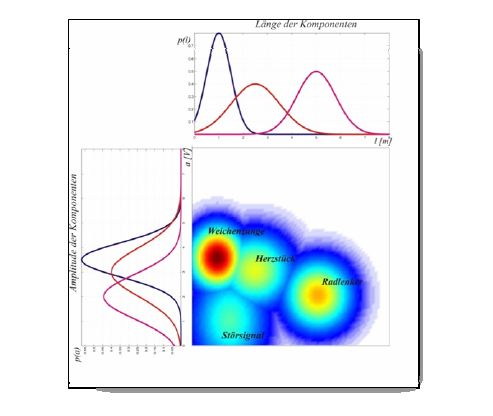 |
Figure 1: Projection of turnout components in feature space
With the characteristic sequence of turnout components, which are switchblade, frog and guard rails, a model-based detection and segmentation of the eddy current sensor signal is done incorporating hidden Markov models.
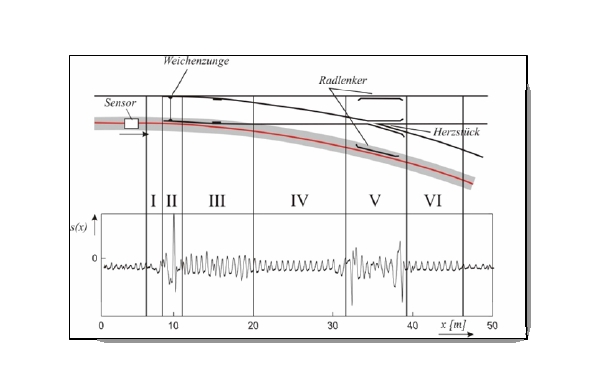 |
Figure 2: Stochastic modeling of a common turnout EW 190 1:9
After transforming the extracted signals into a suitable feature vector, research is conducted on classification, which is achieved with methods based on machine learning concepts.
Figure 3: Segmentation of Eddy-Current-Sensor-Signal
The interpretation of turnouts as nodes in a topological track network, allows a use of the detection and classification results for an on-board autonomous tracking platform that delivers re-calibration points for additional sensor systems, such as GPS or INS-systems.
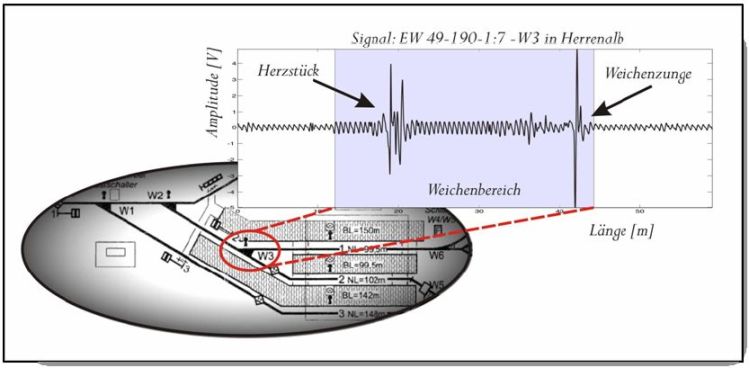 |
Figure 4: Event fusion in topological map
Current research focus is the evaluation of onboard localization systems solely based on eddy current sensor techniques.