Motivation
Robust localization is a precondition to autonomous vehicles. However, exact train localization is often hardly possible with traditional localization sensors like GPS only. Especially in roofed train stations no GPS signal is available. But even in non-roofed areas one can often not distinguish between two parallel tracks. These problems can be solved by knowing the overdriven turnouts and taken direction if compared to a digital map. Hereby, the turnouts get landmarks which can be used for global localization. Different turnouts can have different geometry which can be identified by video systems even before passing the turnout itself.

Figure 1: Detected track Figure 2: Detected turnout
Principle
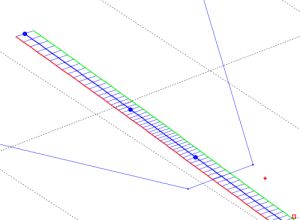
For a successful classification of turnout types, an exact measurement of geometry is necessary. For this measurement a monofocal camera is used that is mounted at the front window of the train. In this work probabilistic 3D spline curves are used as a local model to estimate the exact track using regressive estimation techniques. The track curves can be tracked over time and get improved in every video frame. With the resulting parametric curve representation, geometrics can be easily calculated in an analytical way. The gained data can be used for localization as well as for mapping, when combined with absolute position information.
|
Figure 3: Spline based track model |