Motivation
Worldwide, a raising number of approximately 50 million persons are visually impaired; only in Germany 155 000 persons are completely blind. Even though many blind people manage to find their way within known areas very well, moving through unknown environments poses huge challenges.
Early approaches towards assistance systems for the visually impaired go back to the 1950s, when experiments with wearable ultrasonic range sensors were carried out. Nevertheless, the assistance systems widely used today are still very limited in terms of functional capabilities and range of operation. One reason for that is the increasing training effort necessary to use an assistance system, the more complex it becomes.
In this field of research we develop smart techniques to help people cope with the barriers caused by the lack of vision when navigating public space. We are investigating systems based on stereoscopic cameras, that are carried unobtrusively on the blind person's head. This allows to extend the range of sensing from 1-2m – as possible with a white cane – to more than 10m.
A camera based system allows to detect obstacles and possible danger zones on the blind person's path, as well as guide the person along certain structures like curbstones. The project aims at building a system which is easy to use, which requires minimal training effort, and that enhances the user's perception of the surrounding environment significantly.
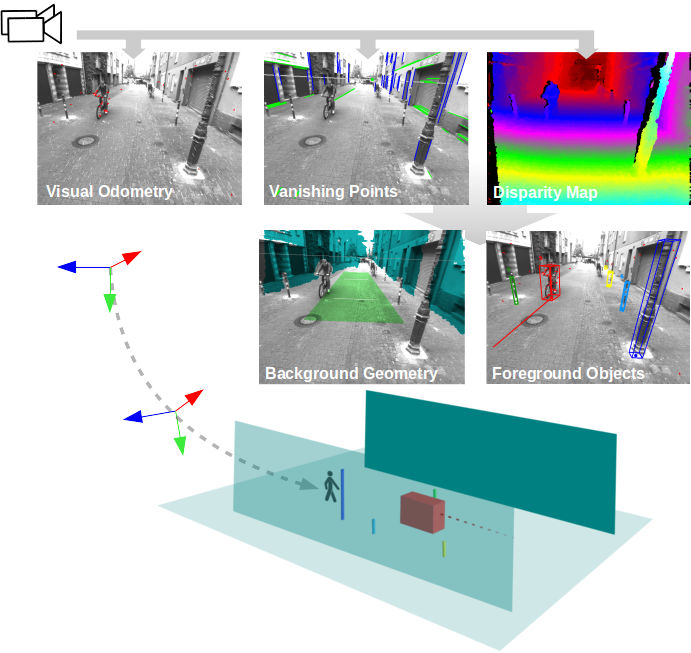
In order to achieve this we apply different computer vision techniques, as dense disparity estimation, sparse feature flow and visual odometry, scene segmentation and object tracking, while always bearing in mind the real time capabilities of a wearable computer platform.