
Robust localization is a fundamental component of autonomous vehicles. In that context essential information has to be provided by a sufficient selection of sensor observations. In case of land-based road-constrained motion a map offers significant information and assists localization with valuable information about the evolution of the kinematic vehicle states. See Figure 1 for typical examples of structured environments.
 |
Figure 1: Examples for highly structured environments
To integrate map information into a localization procedure a reasonable geometric representation of roads or tracks has to be chosen initially. Therefore, prior knowledge about construction rules is used: Commonly roads or tracks are composed by a sequence of geometric primitives to enable a comfortable driving without any abrupt variations in lateral acceleration. Unlike current realizations of road-constrained motion localization or tracking algorithms that often base on polygonal models, smooth spline curves are chosen. Especially in case of curved roads this modelling strategy overcomes systematic interpolation errors and yields precise approximation results, both for strong curved roads and straight road sections. Based on an arc-length curve parameterization a close vehicle-to-map relationship renders possible.
Each available map is subject to geometric errors due to typical surveying and mapping processes that contain measurement and approximation steps. In principle a probabilistic treatment of those errors is required to integrate inaccurate map information in the localization framework. The modelling process in visualized in Figure 2.
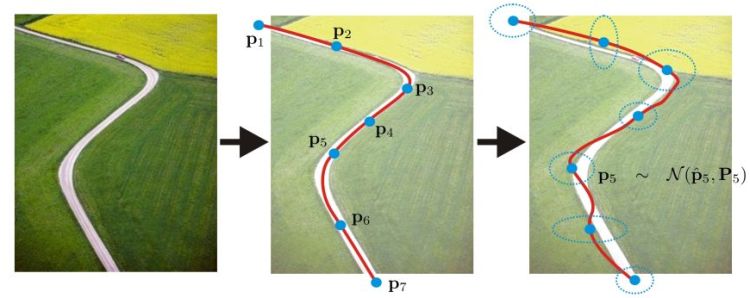 |
Figure 2: Typical road environment (left) interpolated with smooth curve (middle). Geometric map errors modelled by random-variables and stored in probabilistic-road-map (right).
During the last years several concepts have been proposed to assist localization of vehicles using road map information. A key difference of the concepts is the depth of map integration into the localization filter: Several methods match the position estimate onto the map in a post filter processing step, whereas other algorithms obtain pseudo-measurements of the map, which is used as an additional static sensor. The approaches subsumed in a third group directly integrate the available road map within the filtering step. In particular the approaches often make use of a one-dimensional representation of the vehicle kinematics in arc-length coordinates and are applied here. In combination with arc-length parameterized road maps this integration strategy enables analytical transformations between measurement- and state-space and therefore clear observation equations.
A first step is to support the vehicle localization with uncertainty information for every road segment. Here this strategy is expanded: While the probabilistic-road-map assisted vehicle localization is carried out, the mapping process is continued, resulting in a simultaneous static map parameter and kinematic vehicle state estimation. During the map update procedure the geometric map parameters are adapted locally around the current vehicle position. Each time a measurement is assigned to a certain map element the map accuracy increases and the overall precision of the map-assisted localization is continuously improved.