
ITSC 2026
We are happy to announce that two contributions from MRT have been accepted to the IEEE International Conference on Intelligent Transportation Systems (ITSC 2026).
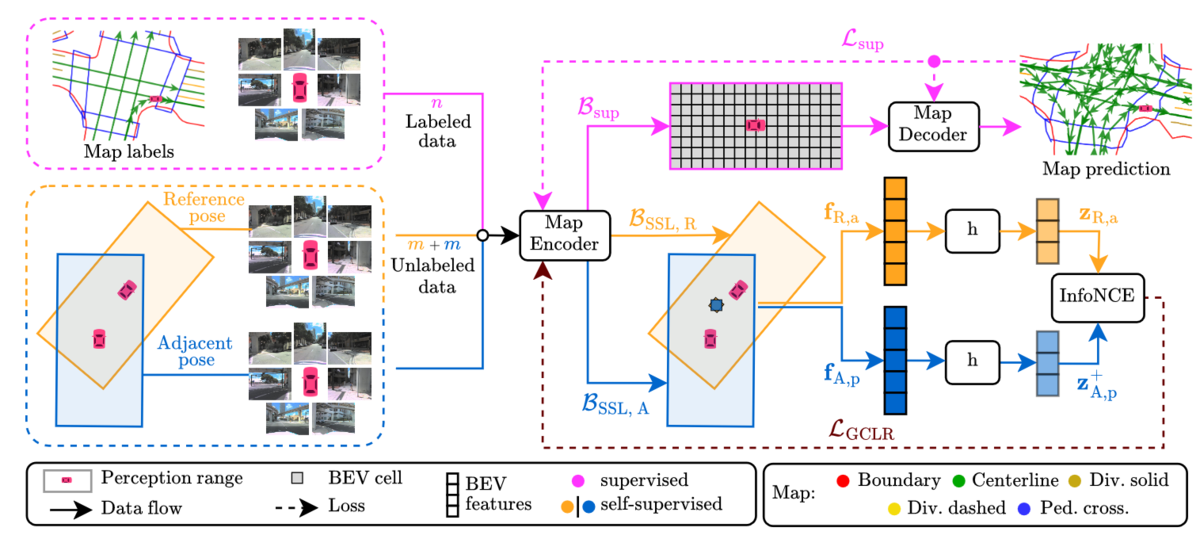
- MapGCLR: Geospatial Contrastive Learning of Representations for Online Vectorized HD Map Construction; Jonas Merkert, Alexander Blumberg, Jan-Hendrik Pauls, Christoph Stiller
MapGCLR advances online HD map construction through semi-supervised geospatial contrastive learning. The key insight is that repeated traversals of the same environment should produce geospatially consistent BEV feature representations, enforced via an InfoNCE contrastive loss. An automated algorithm detects overlapping trajectories, enabling joint training on limited labeled data alongside large unlabeled datasets. Evaluated on Argoverse 2, MapGCLR achieves 13–42% relative mAP improvement over the supervised MapTRv2 baseline, with particularly strong gains in low-label regimes.
ArXiv link: https://lnkd.in/gAWcTcVE
- Learning High-Level Decision Making with an Interaction-Aware Attention-Based Network in Autonomous Driving; Marcelo Contreras Cabrera, Willi Poh, Christoph Stiller, Ehsan Hashemi
The paper introduces DecisionPerceiver, a reinforcement learning–based architecture designed to generate high-level driving commands. An interaction-aware attention mechanism enables the network to process dynamically sized environments by mapping interactions into a compact yet fine-grained latent representation. The resulting architecture reduces computational complexity while simultaneously lowering low-level control effort.
We look forward to discussing our results with the community in Naples!