
High precision digital maps are crucial to steer an autonomous vehicle safely and comfortably through a complex dynamic environment. To plan a trajectory which guides a self-driving car as smoothly as a foresightedly driving human driver, details on a sub-lane level are needed. However, the more details are stored in a map, the faster it becomes outdated.
The goal of our research is to use data from onboard sensors to locally verify the map that is stored on the car. This can either verify the map or mark (parts of) it as invalid.
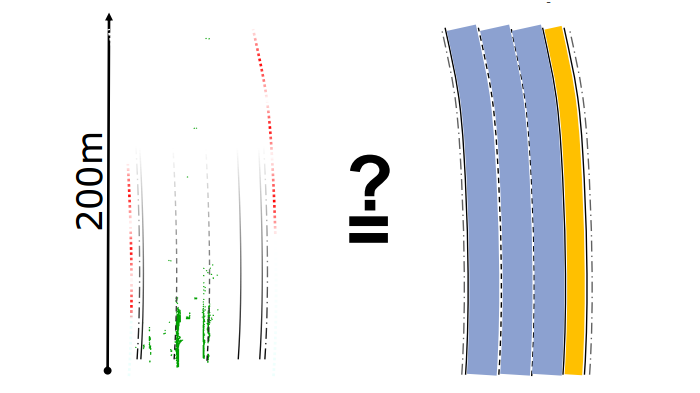
As part of our work, we are developing methods to compare map and sensor data. While the perception is solved using deep learning/machine learning, the association and comparison is solved using classical probabilistic methods to combine the complementary strengths of both fields.
Furthermore, we are trying to identify features that are suitable for map verification. Parts of the map which are eventually marked as changed cannot only be invalidated for all other components of an autonomous car, but also sent back to a remote server. When permanent changes are identified, they could either trigger a remapping process or directly be used as a map update.
Publications
Jan-Hendrik Pauls, Christoph Stiller. Aktualitätsverifikation semantischer HD-Karten für das urbane automatisierte Fahren. In 14. Workshop Fahrerassistenz und automatisiertes Fahren, Seiten 47--56, 5 2022.
Jan-Hendrik Pauls, Tobias Strauss, Carsten Hasberg, Christoph Stiller. Boosted Classifiers on 1D Signals and Mutual Evaluation of Independently Aligned Spatio-Semantic Feature Groups for HD Map Change Detection. In 2021 IEEE Intelligent Vehicles Symposium (IV), Seiten 961--966, 2021.
Jan-Hendrik Pauls, Tobias Strauss, Carsten Hasberg, Martin Lauer, Christoph Stiller. HD Map Verification Without Accurate Localization Prior Using Spatio-Semantic 1D Signals. In 2020 IEEE Intelligent Vehicles Symposium (IV), Seiten 680--686, 2020.
Jan-Hendrik Pauls, Tobias Strauss, Carsten Hasberg, Martin Lauer, Christoph Stiller. Can We Trust Our Maps? An Evaluation of Road Changes and a Dataset for Map Validation. In Proc. IEEE Intell. Trans. Syst. Conf., Seiten 2639--2644, Hawaii, USA, November 2018.