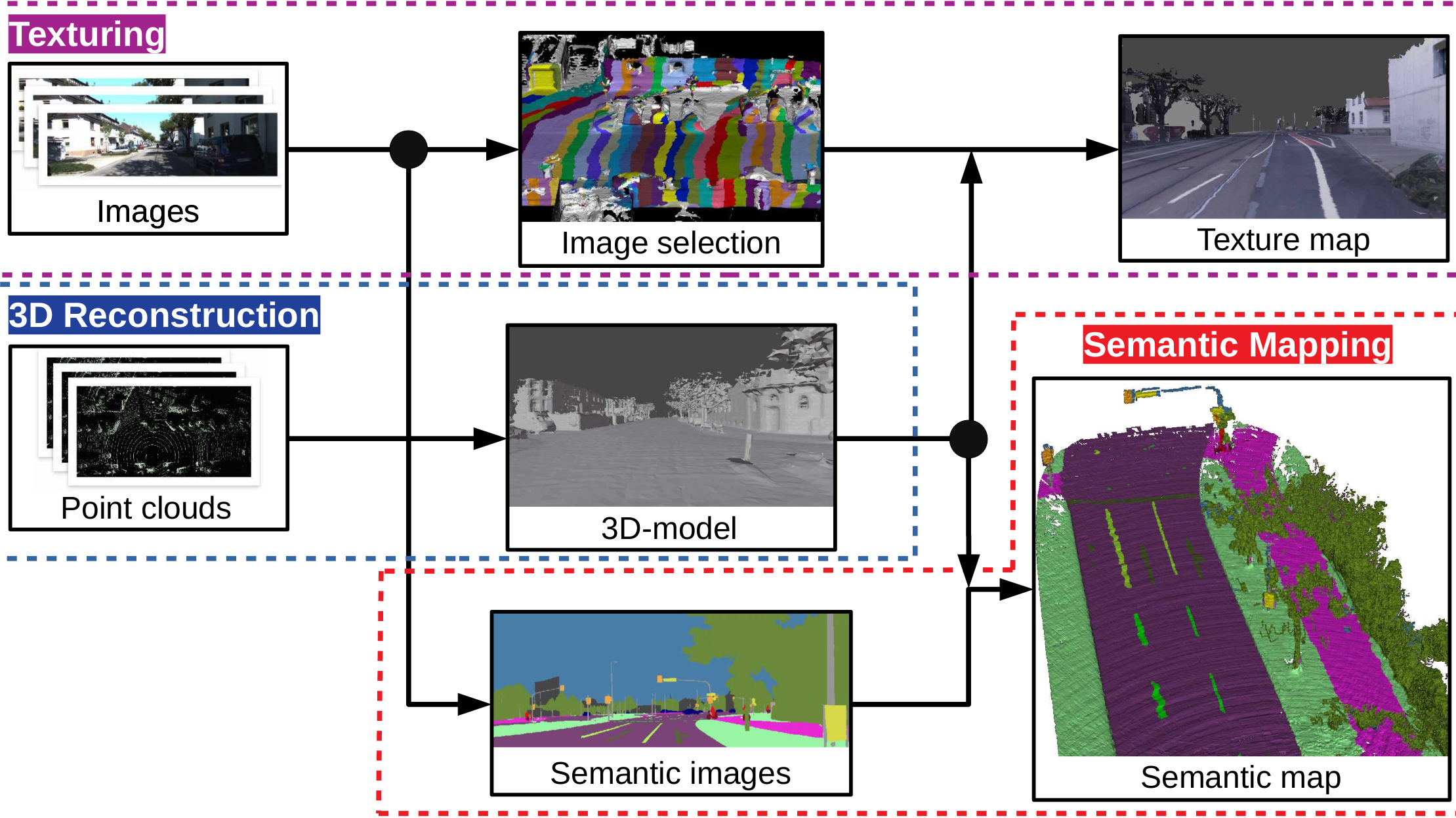
3D reconstructions can be used for localization, simulation, visualization, and many more tasks. Modern LiDAR sensors provide a large amount of sub-centimeter accurate point measurements of their environment. We fuse this data using a volumetric reconstruction approach that allows for the reconstruction of large areas. The challenge is to incorporate data from multiple drives in a way that improves the reconstruction. In order to do so, loop closures have to be detected and all sensor poses have to be determined in a way that results in a consistent model of the environment. After the geometry has been reconstructed, it can be textured from camera images or semantic segmented images.
Publications
Haohao Hu, Hexing Yang, Jian Wu, Xiao Lei, Frank Bieder, Jan-Hendrik Pauls, Christoph Stiller. Large-Scale 3D Semantic Reconstruction for Automated Driving Vehicles with Adaptive Truncated Signed Distance Function. IEEE Intelligent Vehicles Symposium (IV), Anchorage, Alaska, January 2023.
Tilman Kühner. Large-Scale Textured 3D Scene Reconstruction. Dissertation, Institut für Mess- und Regelungstechnik, Karlsruher Institut für Technologie (KIT), Karlsruhe, 2020.
Tilman Kühner, Julius Kümmerle. Large-Scale Volumetric Scene Reconstruction