For automated vehicles, high-definition maps (HD maps) are required to overcome the shortcomings of the online perception system. For the HD maps generation, the estimation of highly accurate ego-vehicle motion is the key technique. Common approaches, which only use inertial measurement units (IMU) with global navigation satellite systems (GNSS) can not provide accurate ego-motion, especially in urban areas due to shadowing and non-line-of-sight (NLOS) effects.
To reach this goal, we investigate the Life-Long Continuous Time Mapping and Localization using IMU, cameras and LiDAR mounted on the vehicle. The motion data from different sensors is fused in a time-continuous way. The output of our system is a highly accurate continuous trajectory with local and global consistency. Using this trajectory, several applications like online localization map generation, 3d (semantic) reconstruction, HD maps generation, and automated training data generation can be applied.
Publications
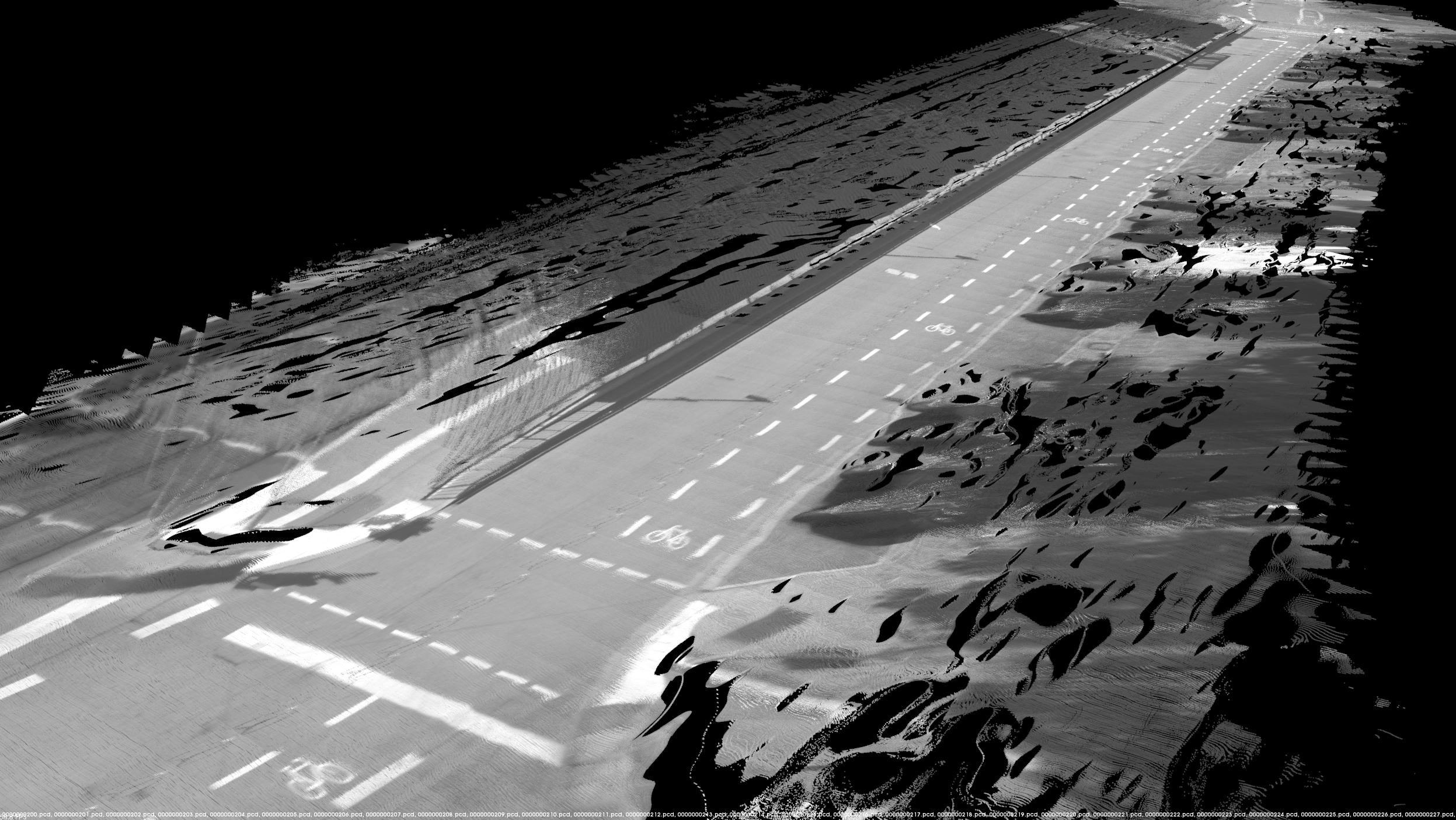
Sascha Wirges, Kevin Rösch, Frank Bieder, Christoph Stiller. Fast and Robust Ground Surface Estimation from LiDAR Measurements using Uniform B-Splines. In Proc. International Conference on Information Fusion (FUSION), Sun City, South Africa, Nov 2021.
Haohao Hu, Lukas Sackewitz, Martin Lauer. Joint Learning of Feature Detector and Descriptor for Visual SLAM. In IEEE Intelligent Vehicles Symposium (IV), Nagoya, Japan, July 2021.
Haohao Hu, Johannes Beck, Martin Lauer, Christoph Stiller. Continuous Fusion of Motion Data Using an Axis-Angle Rotation Representation with Uniform B-Spline. Sensors, 21(15), 2021.
Haohao Hu, Johannes Beck, Martin Lauer, Christoph Stiller. Continuous Fusion of IMU and Pose Data using Uniform B-Spline. In International Conference on Multisensor Fusion and Integration (MFI), Karlsruhe, Germany, September 2020.
Haohao Hu, Aoran Wang, Marc Sons, Martin Lauer. ViPNet: An End-to-End 6D Visual Camera Pose Regression Network. In Proc. IEEE International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, September 2020.
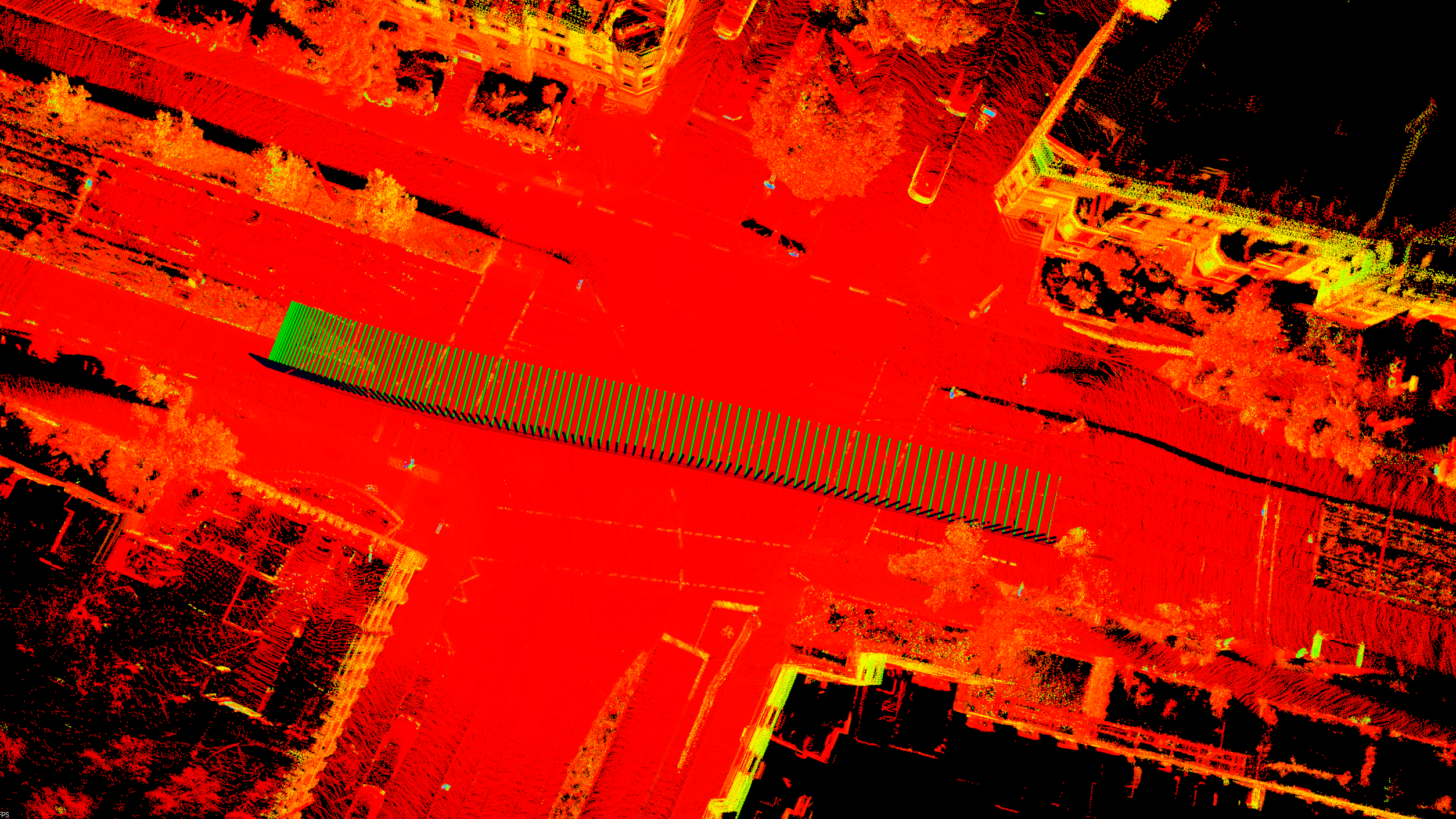
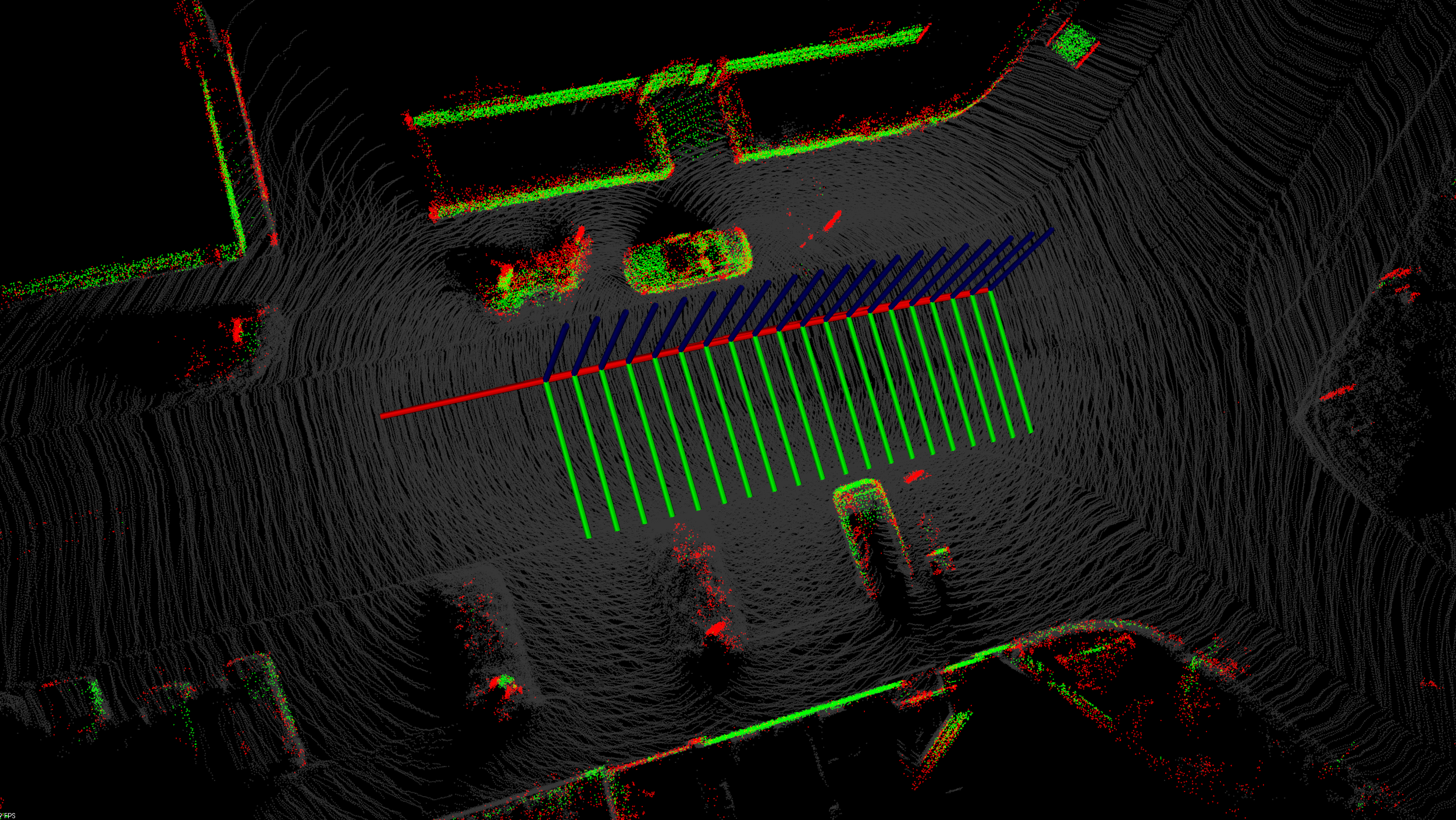
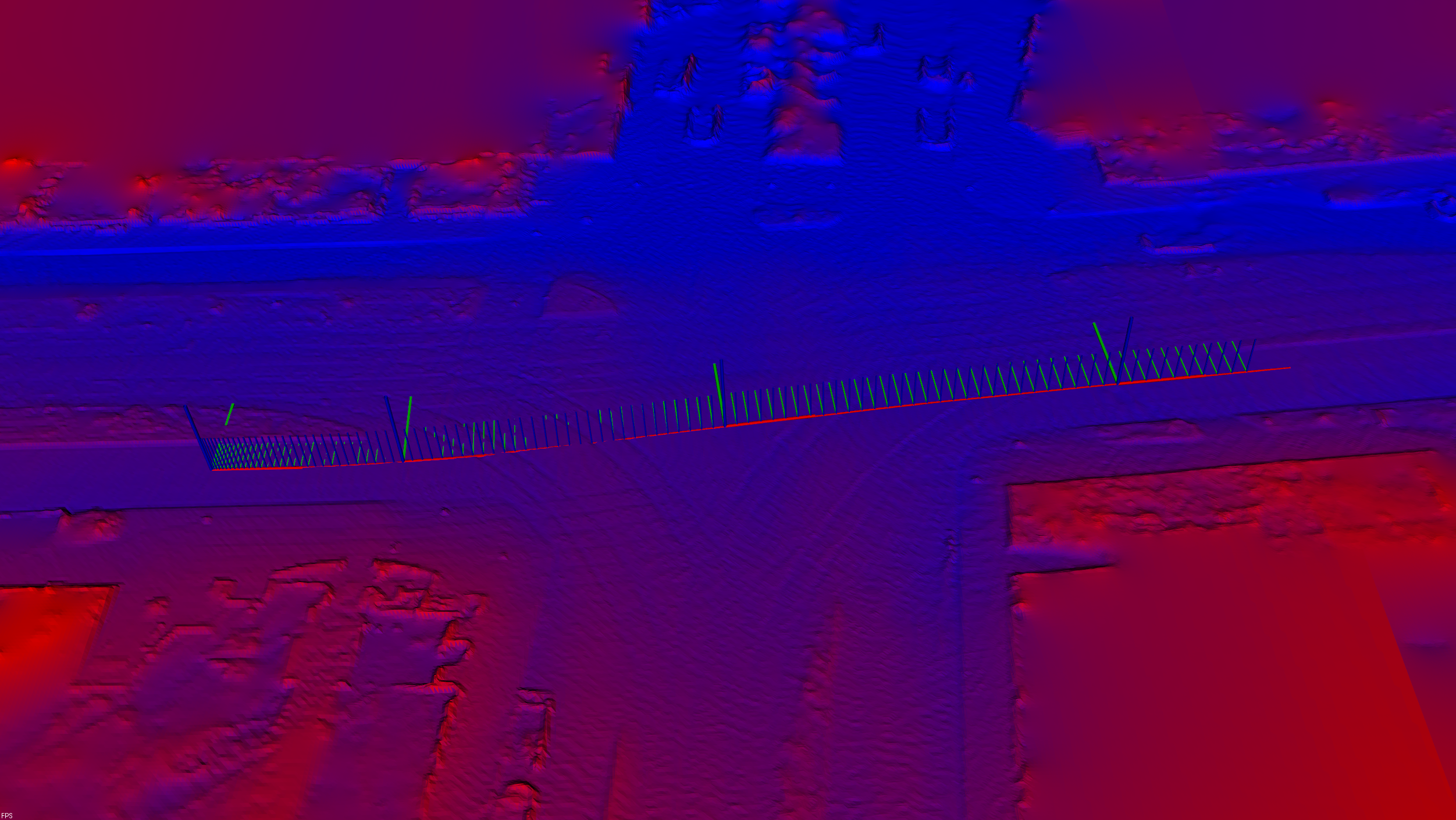
Haohao Hu, Marc Sons, Christoph Stiller. Accurate Global Trajectory Alignment using Poles and Road Markings. In IEEE Intelligent Vehicles Symposium (IV), Paris, France, June 2019.
Marc Sons, Christoph Stiller. Efficient Multi-Drive Map Optimization towards Life-long Localization using Surround View. In 2018 IEEE 21st International Conference on Intelligent Transportation Systems (ITSC), 2018.
Marc Sons, Martin Lauer, Christoph G. Keller, Christoph Stiller. Mapping and Localization using Surround View. In 2017 IEEE Intelligent Vehicles Symposium (IV), June 2017.
Marc Sons, Henning Lategahn, Christoph G. Keller, Christoph Stiller. Multi trajectory pose adjustment for life-long mapping. In 2015 IEEE Intelligent Vehicles Symposium (IV), Seiten 901--906, June 2015.