Scalable and safe approaches to map based automated driving need to perceive lanes, traffic lights, signs and resulting drivable lanes allowing automation even if the HD map is outdated.
Large scale automated driving datasets are increasingly containing HD maps, matching the recorded scenarios with sensor data. This allows for the development of deep learning based perception methods for physical map features such as road boundaries, lane dividers, pedestrian crossing and so on. Additionally more abstract feautures such es the connectivity of lane segments and the relationship between lanes and traffic lights or signs can be learned.
We research methods of perceiving map features of different abstraction levels with the additional incentive to fuse verified map parts into the perception result, allowing for a safe and scalable approach to map based automated driving.
Publications
Annika Meyer, Christoph Stiller. YOLinO: Echtzeitfähige Schätzung von linienförmigen Kartenelementen im Kontext des automatisierten Fahrens. In 14. Workshop Fahrerassistenz und automatisiertes Fahren, Seite 99108, 5 2022.
Annika Meyer, Philipp Skudlik, Jan-Hendrik Pauls, Christoph Stiller. YOLinO: Generic Single Shot Polyline Detection in Real Time. In IEEE International Conference on Computer Vision (ICCV) Workshops, Seiten 2916--2925, 2021.
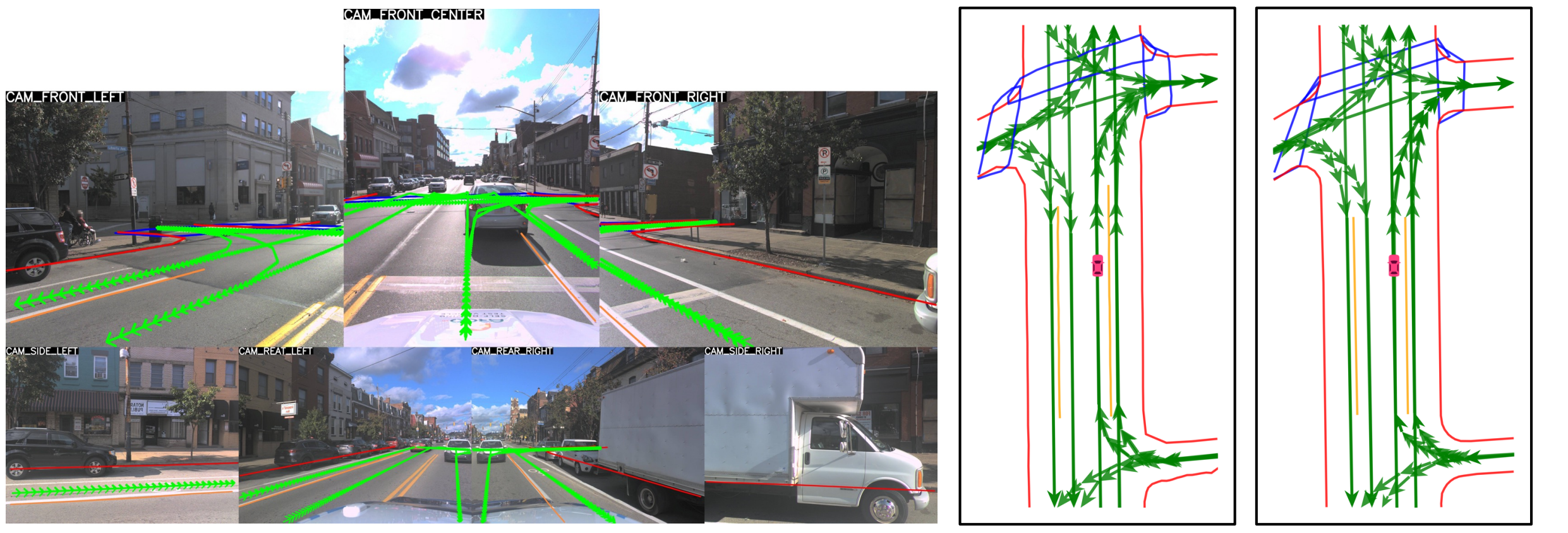
Annika Meyer, Jonas Walter, Martin Lauer. Fahrstreifengenaue Kreuzungsschätzung anhand der Fahrtverläufe anderer Verkehrsteilnehmer. In 13. Workshop Fahrerassistenz und automatisiertes Fahren (FAS), July 2020.
Annika Meyer, Jonas Walter, Martin Lauer. Fast Lane-Level Intersection Estimation using Markov Chain Monte Carlo Sampling and B-Spline Refinement. In 2020 IEEE Intelligent Vehicles Symposium (IV), Oct 2020.
Annika Meyer, Jonas Walter, Martin Lauer, Christoph Stiller. Anytime Lane-Level Intersection Estimation Based on Trajectories of Other Traffic Participants. In 2019 22nd International Conference on Intelligent Transportation Systems (ITSC), October 2019.
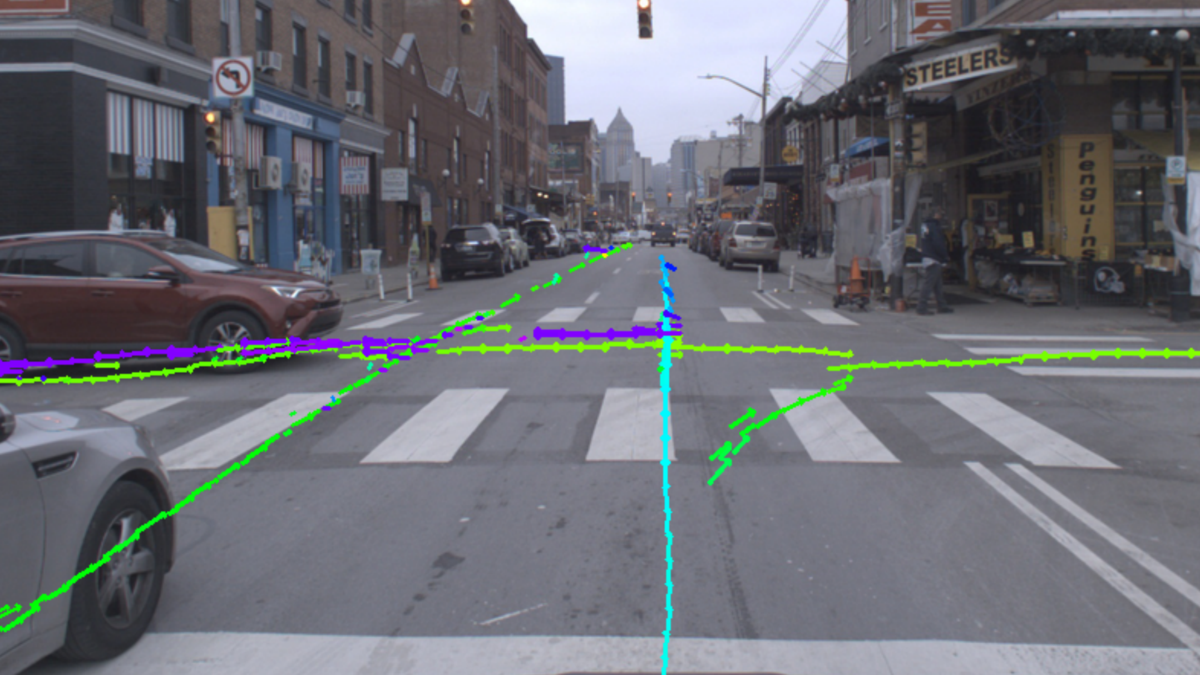
Annika Meyer, N. Ole Salscheider, Piotr F. Orzechowski, Christoph Stiller. Deep Semantic Lane Segmentation for Mapless Driving. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Seiten 869--875, Madrid, Spain, October 2018.
Open Source Projects
https://github.com/KIT-MRT/YOLinO