
The conventional creation of high precision digital maps require substantial investment in operating measuring vehicles. Constant changes in the environment, however, limit the usefulness of such maps if not kept updated equally frequently.
Many modern production vehicles however are already equipped with some degree of driver assist and automation features that do rely on the detection of road properties like traffic lines, signs, lights and others. Together with location data, fleet data can be obtained by the manufacturer.
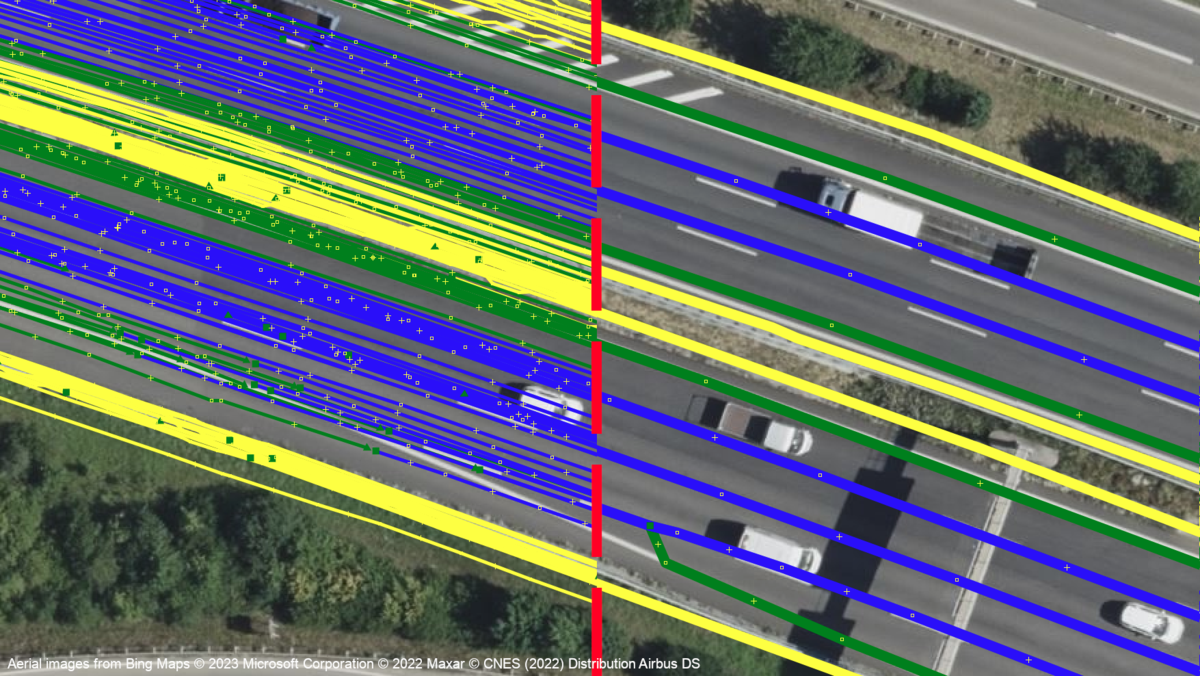
Our work focuses on using both conventional algorithms as well as neural networks to aggregate individual trips and estimate traffic line positions first using interstate scenarios. Learned methods are also thought to be employed to then generate maps sufficient for planning for autonomous driving. Further focus lies on extending the scope to urban scenarios as well.