Autonomous vehicles and modern advanced driver assistance features require information about the static environment at lane-level resolution and decimeter precision. In order to minimize data storage and data transmissions, this information is stored in a vectorized or parametric form, often referred to as HD map.
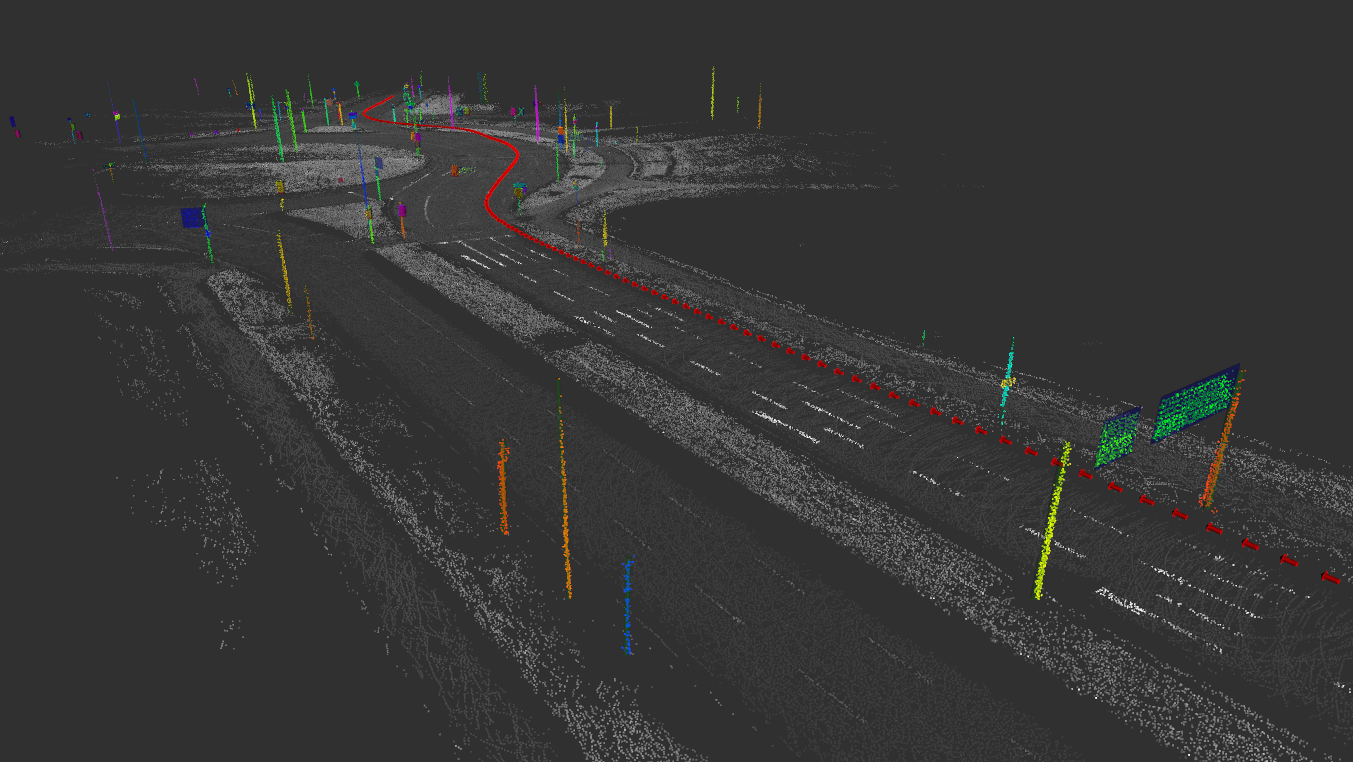
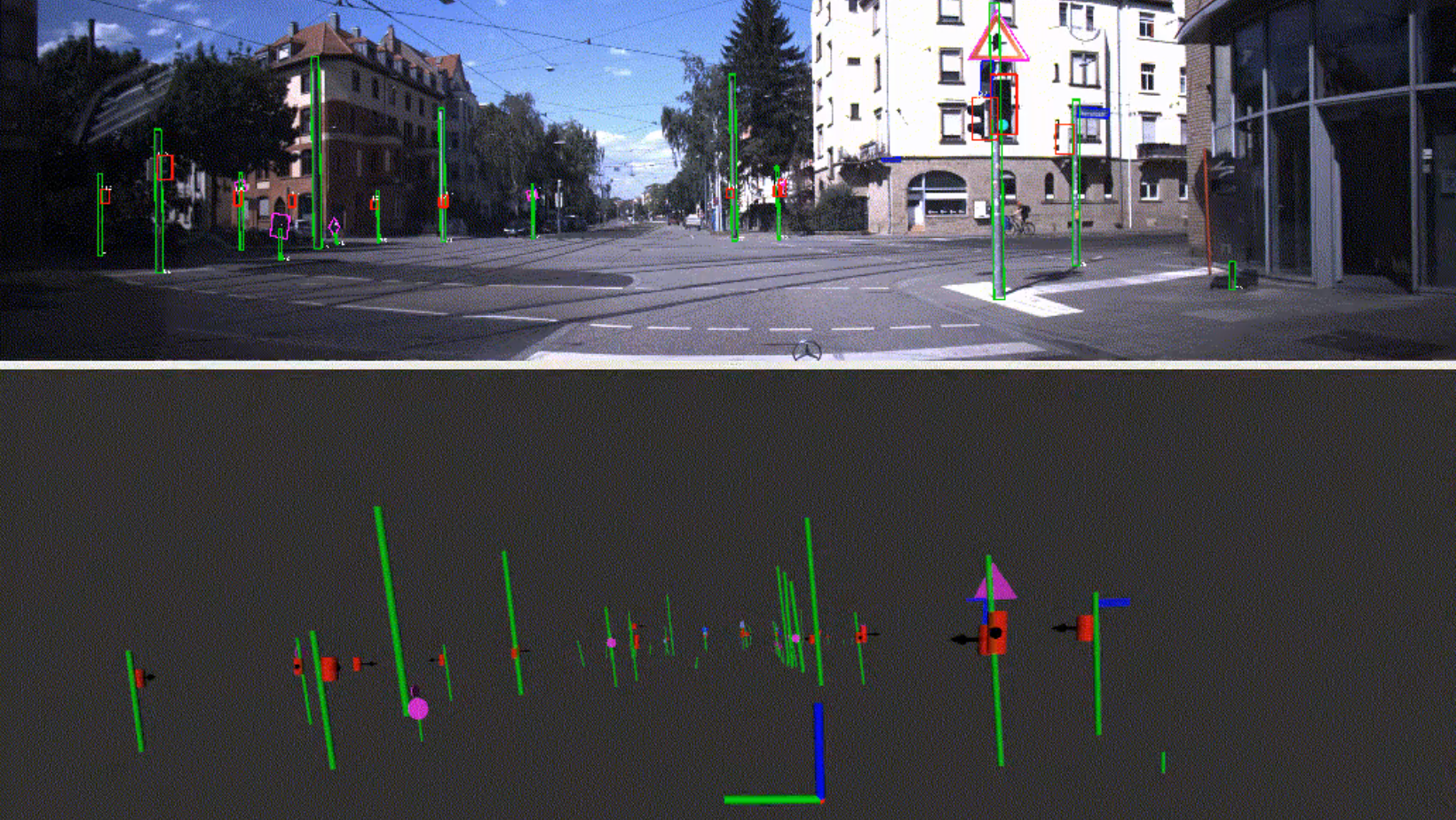
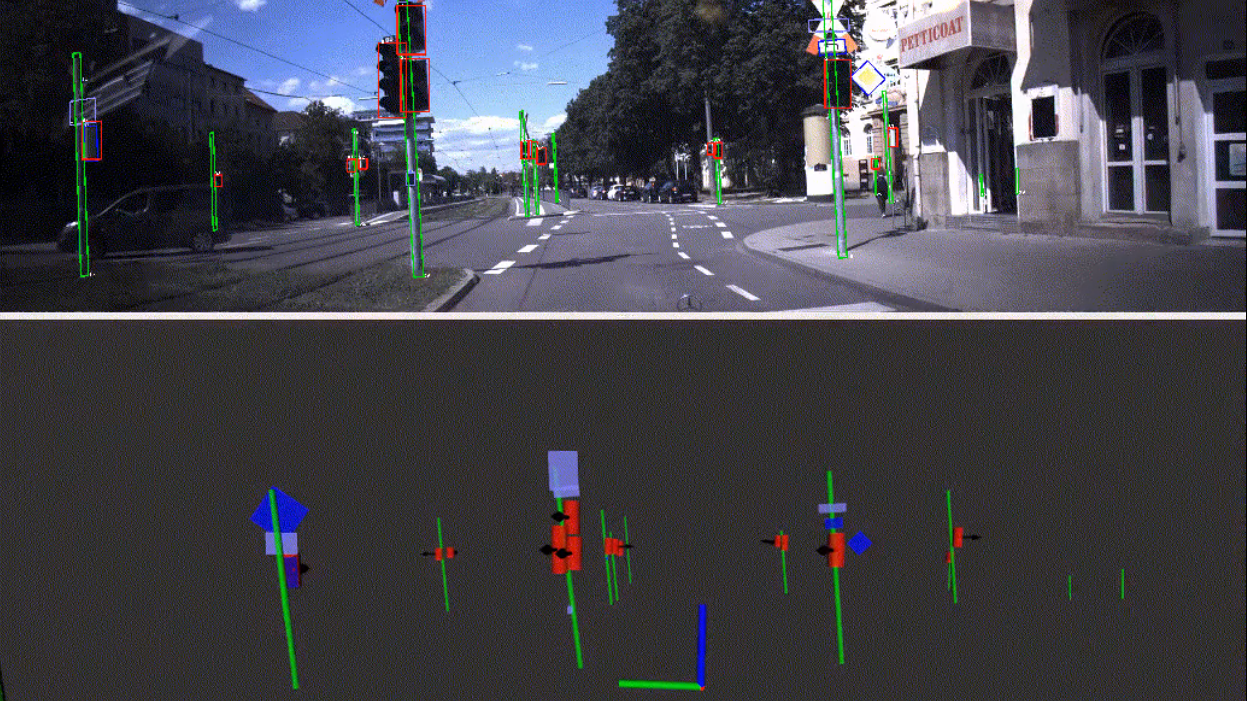
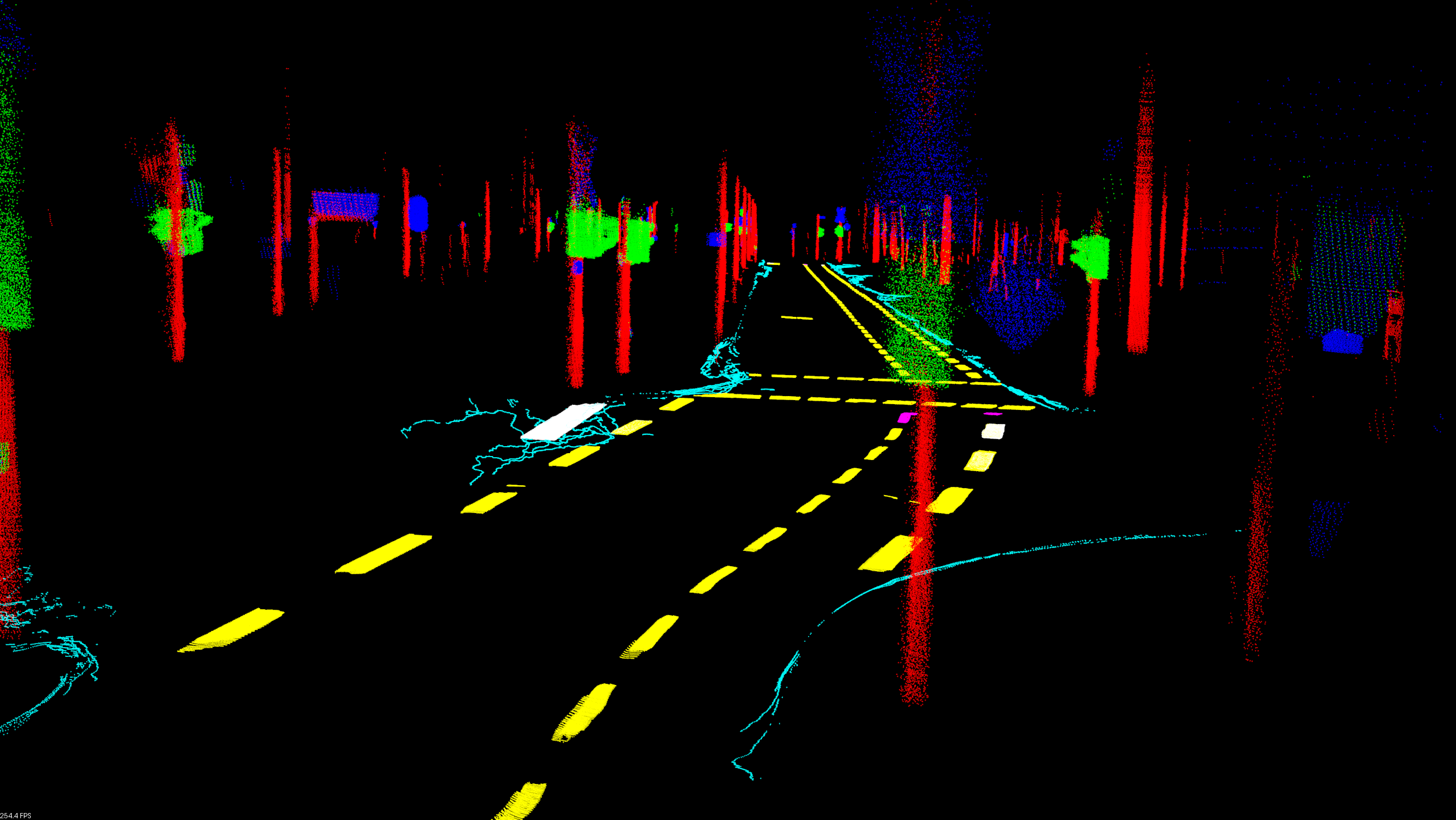
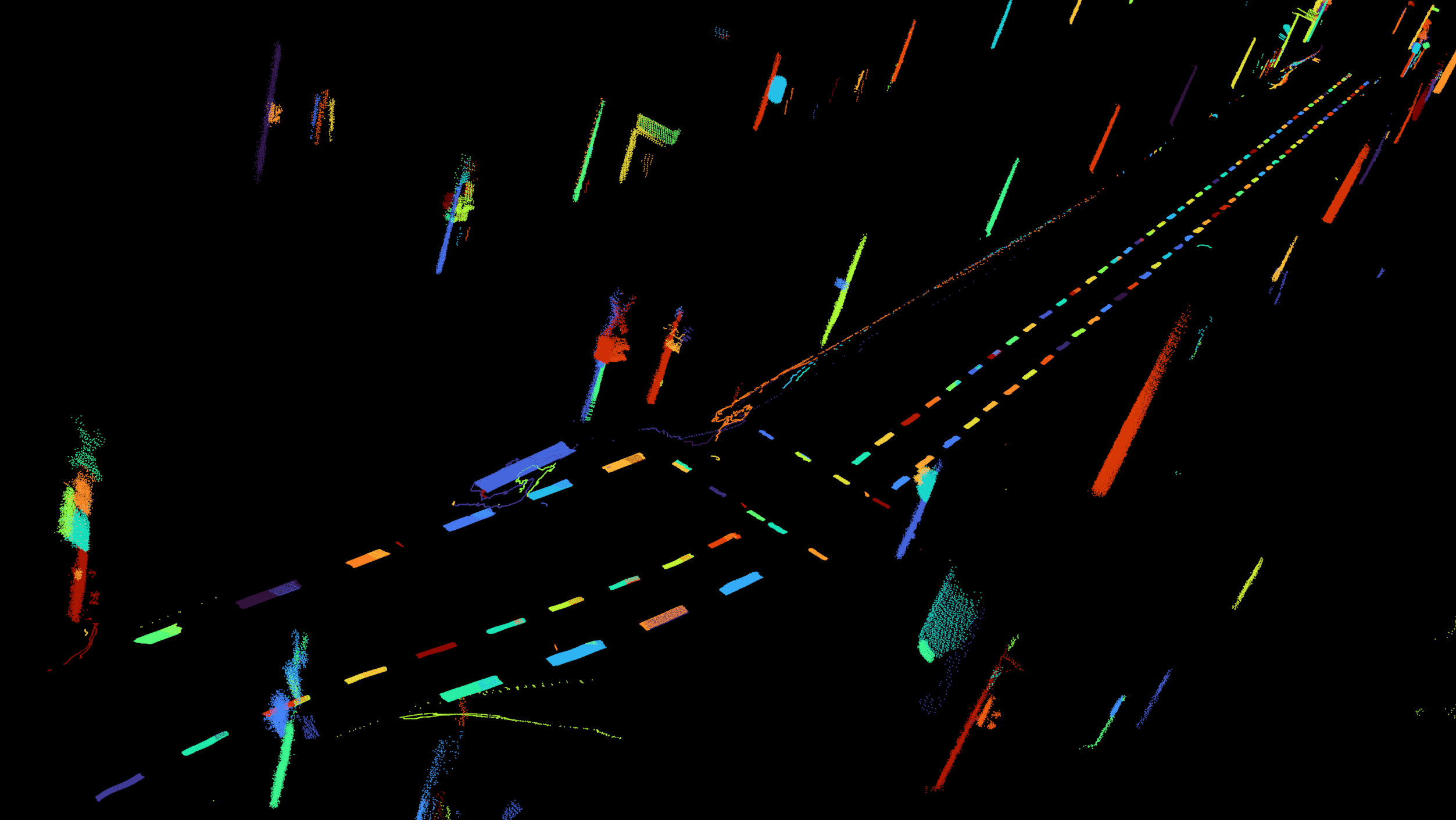
Deep learning methods can be used to extract the physical map elements, such as road markings, traffic lights, and road signs, from sensor data. Multiple measurements and even multiple drives can then be combined and optimized jointly.
To derive the abstract layers of an HD maps, i.e. traffic rules, meaningful relations between map elements, and eventually a routing graph, the physical layer can be parsed and analyzed. A semi-automatic mapping framework can then create comprehensive HD maps with minimal human intervention.
Publications
Jan-Hendrik Pauls, Benjamin Schmidt, Christoph Stiller. Automatic Mapping of Tailored Landmark Representations for Automated Driving and Map Learning. In 2021 IEEE International Conference on Robotics and Automation (ICRA), Seiten 6725--6731, 2021.
Fabian Poggenhans. Generierung hochdetaillierter Karten für das automatisierte Fahren. Dissertation, Institut für Mess- und Regelungstechnik, Karlsruher Institut für Technologie (KIT), Karlsruhe, 2019.