
Uncertainties ranging from sensor noise to unobservable intentions of other traffic participants accumulate in the data processing pipeline in autonomous driving, resulting in incomplete or even misinterpreted environment representations. This frequently leads motion planning algorithms to plan motions of conservative driving style.
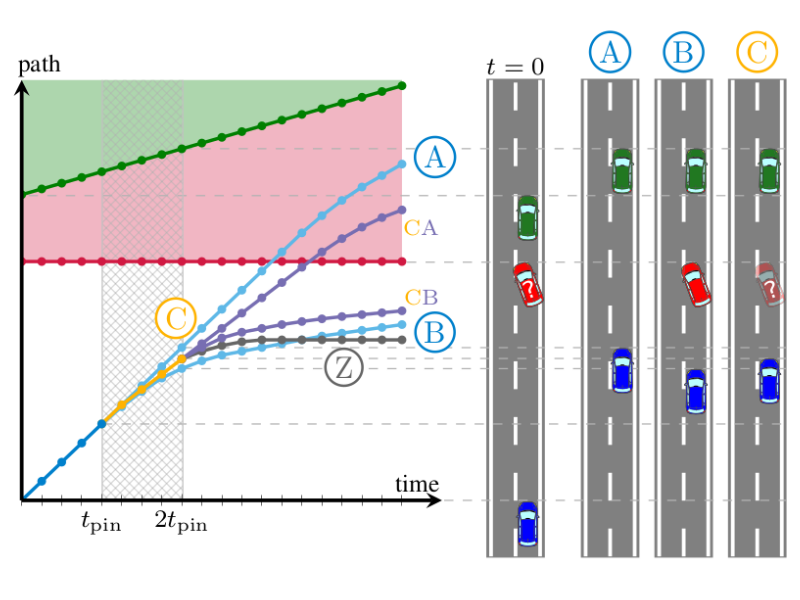
In our research, we use numerical optimization to develop plans that compensate for deficiencies in preceding modules by exploiting the reaction capabilities of a vehicle. The planner concurrently considers multiple maneuvers, yielding a motion profile shaped by the individual probabilities of each maneuver. It ensures safety by maintaining the feasibility of a chance-constrained fallback option. This approach inherently postpones maneuver decisions until a later time, particularly when current uncertainty is high.
Contact: Dr.-Ing. Ömer Sahin Tas