
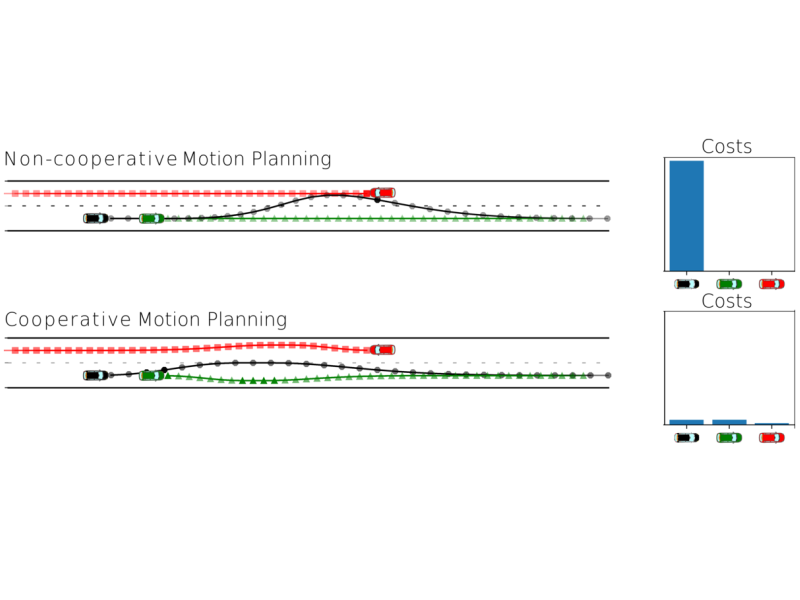
Automated driving has the potential to greatly improve traffic efficiency and safety. This improvement becomes even more significant if not only a single automated vehicle is driving on the road by itself but multiple together. The ability to communicate and react to each other much quicker and more precise than humans ever could enables the possibility of cooperative, coordinated maneuvers among automated vehicles. We investigate the potential of multi-vehicle motion planning. By planning the trajectories jointly, a coordinated maneuver can be performed, and an overtaking can be performed much more efficiently.
Contact: M.Sc. Nick Le Large