
Many planning problems are formulated as the minimization of a cost function which accounts for different criteria such as comfort, safety and efficiency. As an alternative to manually tuning the parameters of the cost function, they can be learned from demonstrations of a human expert using Inverse Reinforcement Learning. We investigate how demonstrated behavior in highway driving can be reproduced by the learned cost function.
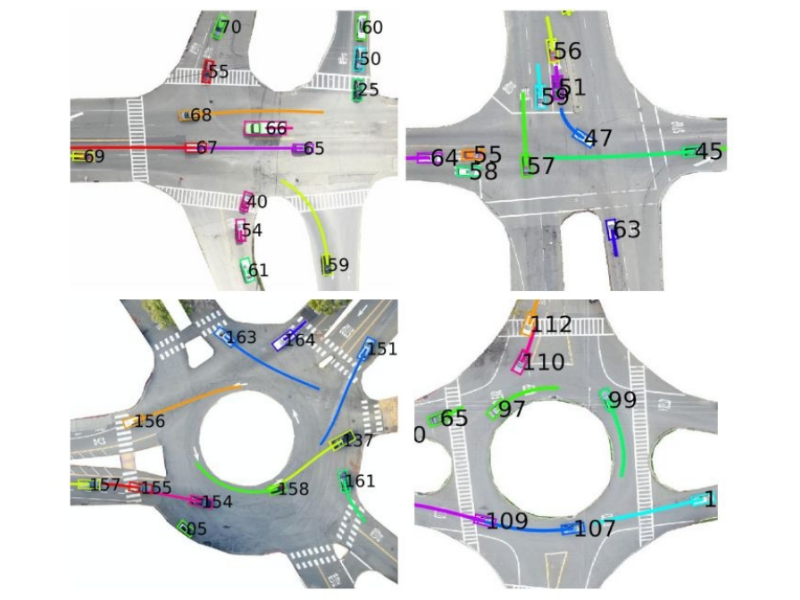
Furthermore, we created the Interaction Dataset, a dataset that contains human driving, cycling and walking behavior, along with high-definition lanelet2 maps. We now focus on analyzing this behavior using Inverse Reinforcement Learning, in order to better understand and predict human behavior, but also to generate human-like behavior.
Contact: M.Sc. Johannes Fischer