
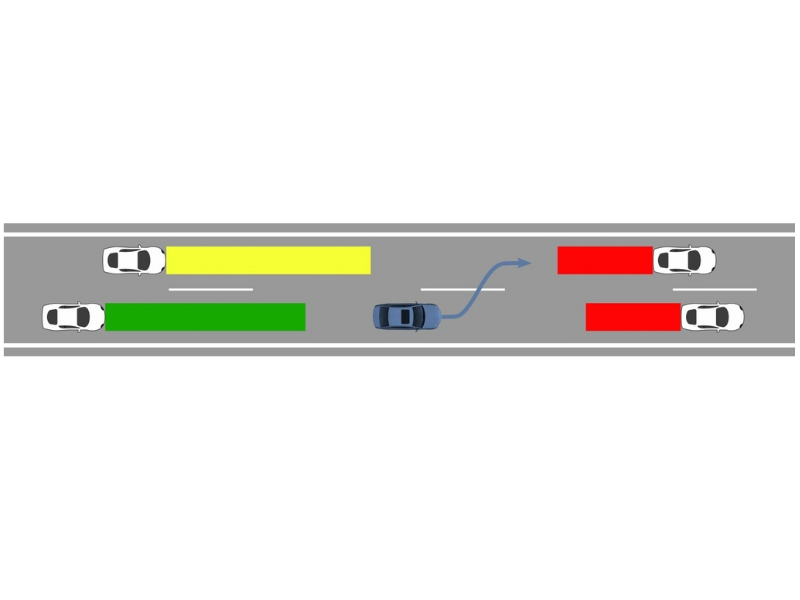
Since human lives must never be put at risk, the safety of automated vehicles must be ensured before their on-road deployment. As shown in many exemplary calculations, a validation solely via test drives is not expedient. In order to validate the safety of automated vehicles, formal methods are promising. Here, we focus on analyzing and extending existing concepts such as Responsibility Sensitive Safety (RSS) and set-based methods. Further, we focus on motion planning and decision making that is safe, yet not over-cautious, since over-cautious behavior might entice human drivers to risky maneuvers (such as overtaking) and thus jeopardize the safety concept.
Contact: M.Sc. Lingguang Wang and Dr.-Ing. Hendrik Königshof