
Measurement, Control and Learning Lab
- type: Internship
- semester: Winter & summer semester
-
place:
Building 40.32 / 40.33
-
time:
Mon.–Thu. 10:00 am – 1:00 pm and 2:00 pm – 5:00 pm
- start: 27/04/2026 – 23/07/2026
- lecturer:
Important information:
The experiments of the RVMRT and MTP internships have been revised and merged into the Measurement, Control and Learning Lab. If you attended the MTP lab in the summer semester 2025 or RVMRT in the winter semester 2025/26, you cannot take the MCL lab, as the experiments are identical!
This internship will be offered exclusively in English! Please make sure to choose a time slot that fits your schedule during registration.
After the registration deadline, we will adjust group allocations in consultation with you if necessary.
General Information
- Motivation and Contents:
Advances in computer technology and artificial intelligence have greatly expanded the possibilities of measurement and control engineering. Sensor data can now be processed and interpreted in real time, while complex control strategies can be simulated and optimized on a computer before implementation. At the same time, machine vision and deep learning open new ways to perceive and interact with technical systems. This lab provides a hands-on introduction to these modern methods. Through application-oriented experiments, students will acquire practical experience in measurement, image processing, machine vision, and control design. The course emphasizes the integration of perception and control, preparing students to work with the tools and approaches that are shaping today's engineering applications.
- Recommended Prerequisites:
- Basic knowledge of the Python programming language
- Knowledge from the lecture "Fundamentals of Measurement and Control Engineering" / "Grundlagen der Mess- und Regelungstechnik" or equivalent
- Knowledge of image processing (e.g., through the Machine Vision or Automotive Vision lecture or equivalent) is an advantage
- Conduct of Experiments:
Each three-hour experiment starts with a ca. 30-minute colloquium. It will be checked whether you are familiar with the topic and content of the experiment. You may only proceed with the actual experiment if the colloquium is passed. Thorough preparation is required to pass the colloquium.
- Brief description of the Experiments:
- A1 Measurement of Stochastic Signals:
This experiment is divided into 2 parts. In the first part, the acceleration of gravity is estimated from a series of observations. The gravitational acceleration is derived from the measured height of fall and the duration of the fall of a ball. In addition to the actual determination of the measured value (acceleration of gravity), a discussion of the measurement accuracy is essential, since without accuracy the measurement result has no meaningfulness.
In part two, the Kalman filter is presented and explained using a clear example. - B1 Computer Vision: Image acquisition and analysis:
The C-series of experiments in this lab deals with measuring and processing signals in image form. In the first experiment, students will learn how to capture images with a camera. Subsequently, converting images into different formats and analyzing image properties will be taught. Statistical methods such as histograms will be used for the analysis, and various lighting parameters will be tested. - B2 Computer Vision: Image processing:
The second experiment in the C-series focuses on various image processing techniques, such as filtering. Using different filters, edges of objects will be detected, and then a Hough transformation will be implemented to approximate shapes. Based on the detected edges and shapes, objects in the image can be segmented. For comparison, segmentation based on a color filter will also be implemented. - B3 Computer Vision: 3D scene understanding:
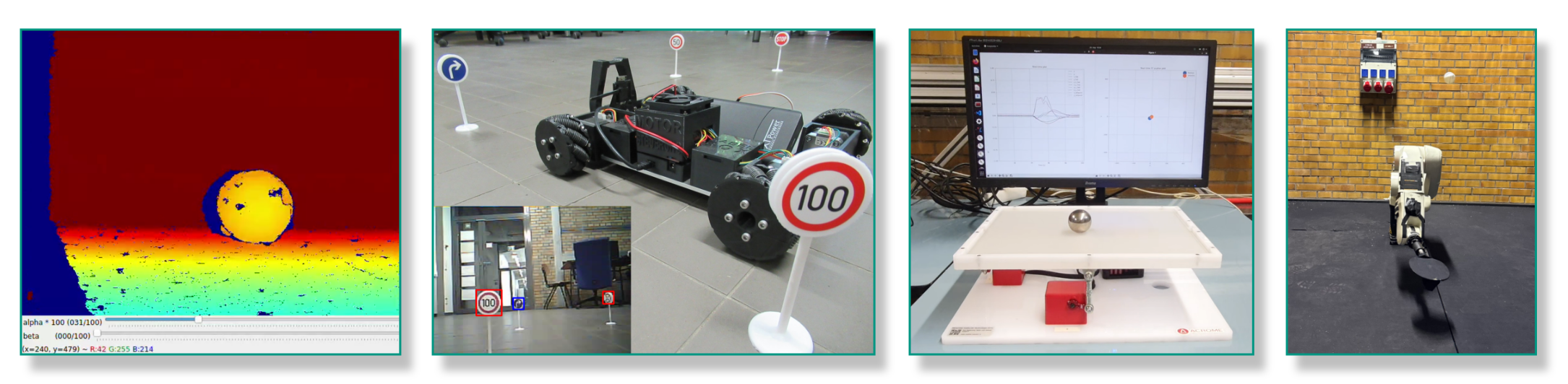
In the last part of the C-series, the topic of 3D scene understanding will be addressed. For this purpose, students will create a camera model for a stereo camera as a basis for depth estimation and analyze the positions of various objects in the space. Based on this depth estimation, a 3D grid will be generated, which reflects the scene in the camera image in 3D space. - C1 Deep Learning: Object detection for an autonomous model car:
In many areas of image processing, classical methods have been replaced or extended by learning methods. In this experiment, students will be introduced to neural networks, a technique from deep learning. For this purpose, an autonomous driving car will be extended with traffic sign recognition, so that this car drives a course based on traffic signs. For this traffic sign recognition, a neural network will be trained on a given dataset, and the driving behavior of the vehicle (e.g., collision avoidance) will be optimized. - D1 Control of an Industrial Robot:
In experiment D1, the knowledge from image processing will be applied and extended with control. This is done using an overall system, in this case, an industrial robot arm. This robot arm has a table tennis racket mounted on the gripper, and the goal of this experiment is for the robot to juggle the ball using table tennis ball recognition and control. For this purpose, the system must be analyzed, and a discrete controller must be implemented and parameterized. - D2 and D3 Control of a ball-balancing table: Actuation & Control design:
The series of experiments on the ball-balancing table is divided into two parts, each conducted on a separate experiment date. In an experimental setup consisting of a table that can be tilted in two directions by servo motors, control engineering fundamentals will be practically tested. The goal is to balance a ball on the table and follow various predefined paths. This will initially be achieved with a simple PID controller and a filter for the sensor measurements. Suitable filter and control parameters will be determined analytically and experimentally, and their influence on control behavior and control quality will be qualitatively and quantitatively evaluated. Finally, an outlook on control concepts beyond the basic lecture will be given.
- A1 Measurement of Stochastic Signals:
MCL Lab in Summer Semester 2026
- All relevant information about organization, guidelines, make-up sessions and experiment instructions will be published in the ILIAS course.
- For the participation in the lab in the summer semester 2026 you have to register on the ILIAS course: from March 23, 2026 (00:00 am) to April 13, 2026 (00:00 am)
- Experiment instructions can be found in the ILIAS course
- The Group division will be published shortly after registration in the ILIAS course.
(Important: The internship must also be registered as an exam in the KIT student portal!)
Dates:
Experiment A1: Week 18 27/04/2026 - 30/04/2026
Experiment B1: Week 19 04/05/2026 - 07/05/2026
Experiment B2: Week 21 18/05/2026 - 21/05/2026
Experiment B3: Week 24 08/06/2026 - 11/06/2026
Experiment C1: Week 25 22/06/2026 - 25/06/2026
Experiment D1: Week 27 29/06/2026 - 02/07/2026
Experiment D2: Week 28 06/07/2026 - 09/07/2026
Experiment D3: Week 29 13/07/2026 - 16/07/2026
Make-up date:
Week 30 20/07/2026 - 23/07/2026
-> The internship runs throughout the semester. Each group will perform an experiment in its assigned week based on the group schedule.