
INTERACTION Dataset
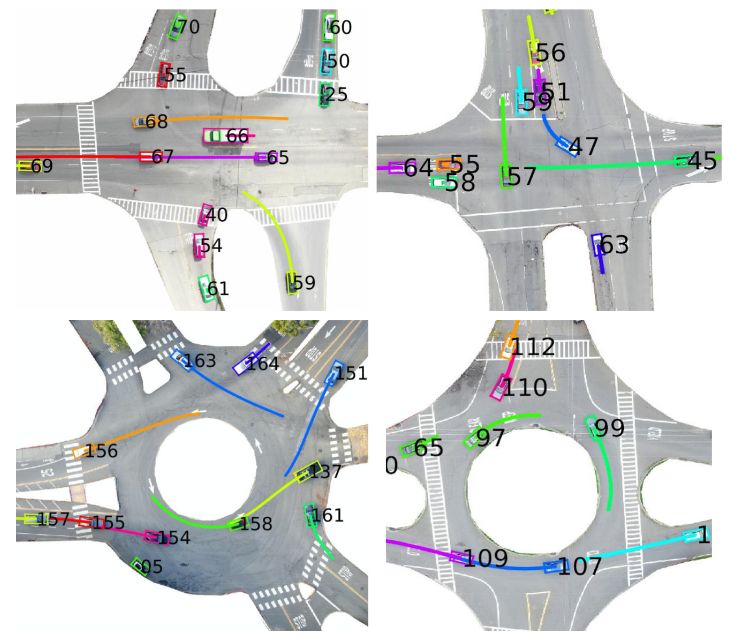
The INTERACTION dataset contains naturalistic motions of various traffic participants in a variety of highly interactive driving scenarios from different countries. The dataset can serve for many behavior-related research areas, such as
- intention/behavior/motion prediction,
- behavior cloning and imitation learning,
- behavior analysis and modeling,
- motion pattern and representation learning,
- interactive behavior extraction and categorization,
- social and human-like behavior generation,
- decision-making and planning algorithm development and verification,
- driving scenario/case generation, etc.
To download the dataset, visit: https://interaction-dataset.com/
For python tools to work with the dataset, visit: https://github.com/interaction-dataset/interaction-dataset
The KITTI Vision Benchmark Suite
This dataset takes advantage of our autonomous driving platform Annieway. We present challenging real-world benchmarks for evaluating tasks such as stereo, optical flow, visual odometry, 3D object detection and 3D tracking. For this purpose, we equipped a standard station wagon with two high-resolution color and grayscale video cameras, using a baseline of roughly 54 centimeters. Accurate ground truth information is provided by a Velodyne laser scanner and a GPS localization system with integrated inertial measurement unit and RTK corrections. All sensors have been calibrated and synchronized. Our datsets are captured by driving around in a mid-size city, rural areas and on highways. Up to 15 cars and 30 pedestrians are visible per image. Besides providing all data in raw format, we extract benchmarks for each task. For each of our benchmarks, we also provide an evaluation metric and an online evaluation website.
Karlsruhe Object Dataset 2011: Cars and Pedestrians
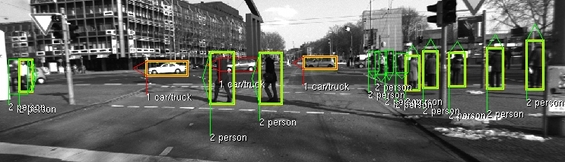
This dataset contains contains roughly 1000 images each and object bounding boxes for cars or pedestrians (~10000 bounding boxes in total). Furthermore, it contains the orientation of each object, discretized into 8 classes for cars and 4 classes for pedestrians. The .zip files provided below come with a MATLAB-based label viewer. Labels are saved as MATLAB matrices (.mat files), where each row is an object in the image and the columns correspond to position, size, class and orientation of the object. You can use this dataset to train your preferred objected detector. We had very good experiences with the cascaded part-based L-SVM from Ross Girshick and Pedro Felzenszwalb, which we modifed to fix the latent orientations to the ones given by the labels. We have been able to detect very small objects by upsampling the original images up to a factor of three. You can download the datasets here.
Karlsruhe Stereo Video Sequences
This dataset contains a couple of high-quality stereo sequences recorded from a moving vehicle driving through the city of Karlsruhe. The sequences are saved as rectified images in *.png format. Calibration parameters of the camera and ground truth odometry from an OXTS RT 3000 GPS/IMU system is provided in a separate text file. You can download the datasets here.
 This dataset contains a couple of high-quality stereo sequences recorded from a moving vehicle driving through the city of Karlsruhe. The sequences are saved as rectified images in *.png format. Calibration parameters of the camera and ground truth odometry from an OXTS RT 3000 GPS/IMU system is provided in a separate text file. You can download the datasets
This dataset contains a couple of high-quality stereo sequences recorded from a moving vehicle driving through the city of Karlsruhe. The sequences are saved as rectified images in *.png format. Calibration parameters of the camera and ground truth odometry from an OXTS RT 3000 GPS/IMU system is provided in a separate text file. You can download the datasets
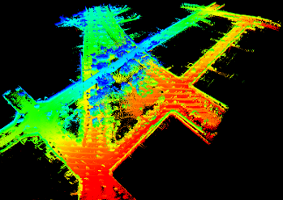
Karlsruhe Velodyne SLAM Dataset (incl Stereo Video)
This dataset contains sensor recordings from our vehicle AnnieWAY at a bridge in the city of Karlsruhe. Driving a loop that passes both below and over the bridge makes it a very special scenario specifially suited for 3D SLAM applications. The used sensors are:
 This dataset contains sensor recordings from our vehicle
This dataset contains sensor recordings from our vehicle - 3D Lidar Scanner: Velodyne HDL64E-S2
- Stereo Camera, calibrated
- GPS/IMU data: OXTS RT 3000
You can download the datasets here
Specialized Cyclist Dataset


This dataset is focused on cyclist detection using a monocular RGB camera in various scenarios experienced on roads in Autumn and Winter (with snow) for enabling researchers to run rigorous tests in various conditions. In both training and testing sets, there are 62297 total images, about 18200 cyclists instances, and 30 different cyclists. Images in 1242x375 (KITTI res.) and 1920x1080 Full HD resolutions.
We utilized the popular KITTI dataset label format so that researchers could reuse their existing test scripts. We encourage researchers to augment their test and validation datasets with extra cyclist instances in the same label and image formats.
We hope that our Specialized Cyclist Dataset will accelerate progress in cyclist detection and improve cyclist safety around autonomous vehicles.
Dataset prepared in collaboration with WINKAM Lab, KIT, Intel, and Specialized Bicycles.
Here you can find the paper with a detailed description of the dataset spec.
LINK TBD
You can download the training set here:
https://drive.google.com/drive/u/0/folders/1inawrX9NVcchDQZepnBeJY4i9aAI5mg9
License Information
The datasets on this webpage are free to use for research and non-commercial projects. When downloading the datasets from this website, you accept our license agreements:
All datasets on this website are copyright by the respective authors and available under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License: